mirror of
https://github.com/blakeblackshear/frigate.git
synced 2025-12-24 11:51:39 +08:00
Compare commits
678 Commits
release_wo
...
v0.14.0-be
| Author | SHA1 | Date | |
|---|---|---|---|
|
|
b97e274b6a | ||
|
|
e6b735231d | ||
|
|
058e9a3ba0 | ||
|
|
4d05bc25f4 | ||
|
|
527d2ab27b | ||
|
|
01e387ee9a | ||
|
|
db496ec525 | ||
|
|
9652ea9e96 | ||
|
|
c935eb0c79 | ||
|
|
c49be0a47f | ||
|
|
592b645231 | ||
|
|
e91f3d8d9b | ||
|
|
910c85b1c0 | ||
|
|
cc3bbcc303 | ||
|
|
2a86969f54 | ||
|
|
dda65ba514 | ||
|
|
e268da9df7 | ||
|
|
e543cc642c | ||
|
|
8897b4b0e0 | ||
|
|
7413810fa4 | ||
|
|
87d3ee09b0 | ||
|
|
6e39d55dd3 | ||
|
|
84e823c62f | ||
|
|
2a16d5593a | ||
|
|
82d4bf8ab5 | ||
|
|
4c87ef56c7 | ||
|
|
bca01cb43c | ||
|
|
c1560308bf | ||
|
|
171a142adb | ||
|
|
0810873988 | ||
|
|
16f1c575d7 | ||
|
|
402f5fa142 | ||
|
|
3ce8816b9a | ||
|
|
5c609c7051 | ||
|
|
8cddfc27fb | ||
|
|
1133202cbd | ||
|
|
a70dd02788 | ||
|
|
97f5ba0145 | ||
|
|
07eef9b139 | ||
|
|
ba03d3b3e4 | ||
|
|
76f822630d | ||
|
|
dd0dee620a | ||
|
|
525de1a467 | ||
|
|
16ead917ea | ||
|
|
46f68ccd73 | ||
|
|
1757f4cb04 | ||
|
|
b10ae68c1f | ||
|
|
b451d0a4f1 | ||
|
|
67bff1e79e | ||
|
|
fbec08354c | ||
|
|
9680f2a574 | ||
|
|
82e443a5c3 | ||
|
|
386ffbf5a6 | ||
|
|
8b344cea81 | ||
|
|
021ffb2437 | ||
|
|
f8523d9ddf | ||
|
|
50ee447e52 | ||
|
|
4216d08099 | ||
|
|
4bcbf7435a | ||
|
|
e1cbefb692 | ||
|
|
2be15b6c01 | ||
|
|
3ed89ec042 | ||
|
|
db8c820677 | ||
|
|
e7ba556919 | ||
|
|
ff2948a76b | ||
|
|
08e5c791c8 | ||
|
|
a0da5018bf | ||
|
|
fc0f6d6095 | ||
|
|
e5e18a5026 | ||
|
|
c0073db859 | ||
|
|
306c11d730 | ||
|
|
ca8ef70096 | ||
|
|
ad87f5786e | ||
|
|
2dd5b893a0 | ||
|
|
51dcdd6f4b | ||
|
|
f0054ceba4 | ||
|
|
216e44bc34 | ||
|
|
e7950abec3 | ||
|
|
b69c1828cb | ||
|
|
7a5df6045a | ||
|
|
a3267f7d44 | ||
|
|
28dd871d44 | ||
|
|
2e63941598 | ||
|
|
b5b819c866 | ||
|
|
499f70cfd3 | ||
|
|
6d2457ebad | ||
|
|
bb335638a4 | ||
|
|
297444375c | ||
|
|
90bdb07463 | ||
|
|
461442b399 | ||
|
|
0080c28c4d | ||
|
|
11ff7cb2b7 | ||
|
|
1c9626ecff | ||
|
|
7745313cdc | ||
|
|
f946cf55be | ||
|
|
c9246bd4ab | ||
|
|
9117043adc | ||
|
|
0c8e155afa | ||
|
|
5bc9f9a388 | ||
|
|
5858eee1fe | ||
|
|
90468c8bf5 | ||
|
|
1c90f62ea5 | ||
|
|
acf37f9920 | ||
|
|
c2c6113299 | ||
|
|
8c610bea49 | ||
|
|
3348af1e6d | ||
|
|
cc851555e4 | ||
|
|
f36e86feb6 | ||
|
|
ab032aa004 | ||
|
|
d0aefc2121 | ||
|
|
c035241b39 | ||
|
|
313e7c016c | ||
|
|
647bcb2618 | ||
|
|
2d71cd7fe2 | ||
|
|
d6e93d039d | ||
|
|
ba3930ab02 | ||
|
|
acadfb6959 | ||
|
|
baf363fcb0 | ||
|
|
57800d3843 | ||
|
|
8092b28710 | ||
|
|
3d612e510c | ||
|
|
3ca2d599d3 | ||
|
|
c83c13938c | ||
|
|
bfefed4d6e | ||
|
|
fe4fb645d3 | ||
|
|
3b0f9988df | ||
|
|
d6dfa596de | ||
|
|
5f15641b1b | ||
|
|
a1905f5604 | ||
|
|
0bad001ac9 | ||
|
|
03e25b3f94 | ||
|
|
fb721ad031 | ||
|
|
8230813b79 | ||
|
|
392ff1319d | ||
|
|
a87cca23ea | ||
|
|
ff823b87c8 | ||
|
|
9be5951076 | ||
|
|
a823a18496 | ||
|
|
d7ae0eedf8 | ||
|
|
7f424bb3f8 | ||
|
|
a3e2171675 | ||
|
|
b65656fa87 | ||
|
|
3788df5bc6 | ||
|
|
11dc407b36 | ||
|
|
13cac082d5 | ||
|
|
7a7ae81d50 | ||
|
|
fb6f415b27 | ||
|
|
049f27d710 | ||
|
|
cf7698e7e1 | ||
|
|
2d5a3c6963 | ||
|
|
0c5aef0907 | ||
|
|
4a7a47a931 | ||
|
|
5970aead0d | ||
|
|
3d43c5e811 | ||
|
|
503dfba719 | ||
|
|
524732ec73 | ||
|
|
15e4f5c771 | ||
|
|
ef52a1d6f0 | ||
|
|
c08a198354 | ||
|
|
9281093740 | ||
|
|
8163c036ef | ||
|
|
c577361923 | ||
|
|
55018372d4 | ||
|
|
f210c4b6f4 | ||
|
|
73c093be43 | ||
|
|
8148a4f9d6 | ||
|
|
25d81b5c6d | ||
|
|
f6ff1c84b8 | ||
|
|
12e6e43d6c | ||
|
|
cf2dfd9a54 | ||
|
|
b26ceff44d | ||
|
|
af320c8c09 | ||
|
|
5085fa7135 | ||
|
|
07ee39b9b8 | ||
|
|
2318e79502 | ||
|
|
fb7cfe5471 | ||
|
|
466a9104e5 | ||
|
|
42559fa55d | ||
|
|
46e3157c7f | ||
|
|
80e330594b | ||
|
|
fbc0da6016 | ||
|
|
0096a6d778 | ||
|
|
427c6a6afb | ||
|
|
483d64e419 | ||
|
|
59335c0628 | ||
|
|
476a900708 | ||
|
|
15dcf1fcc8 | ||
|
|
759ad427d5 | ||
|
|
d1082ec305 | ||
|
|
d7a87fff60 | ||
|
|
4d8d3cd22e | ||
|
|
a886b6a3e5 | ||
|
|
bd70bf1c31 | ||
|
|
99878d9eee | ||
|
|
52f65a4dc4 | ||
|
|
7fac91dce4 | ||
|
|
5853393396 | ||
|
|
7e5eb82882 | ||
|
|
5b5606cb8a | ||
|
|
4d522be7fb | ||
|
|
89f843cf95 | ||
|
|
190cdc471a | ||
|
|
7d3b481181 | ||
|
|
37394fbe19 | ||
|
|
14235c42b9 | ||
|
|
b65aa640c9 | ||
|
|
0223d6df60 | ||
|
|
36d5e5b45f | ||
|
|
985b2d7b27 | ||
|
|
35ecb342bb | ||
|
|
f3abc590e7 | ||
|
|
4e800e19ff | ||
|
|
559e6910c4 | ||
|
|
d5989c91a8 | ||
|
|
98a1e6ee22 | ||
|
|
d945e77443 | ||
|
|
8f69edeb33 | ||
|
|
c82ed43c13 | ||
|
|
1377d33e25 | ||
|
|
1cd374d3ad | ||
|
|
6fbd272acf | ||
|
|
bc6b4c38b8 | ||
|
|
30d93e1d90 | ||
|
|
7b7d3c56cc | ||
|
|
71c7504de5 | ||
|
|
6dd6ca5de5 | ||
|
|
51db63e42b | ||
|
|
258cd5b6d7 | ||
|
|
7b64091128 | ||
|
|
24d29dd32c | ||
|
|
37f60f7140 | ||
|
|
0fda7147be | ||
|
|
f91dc37399 | ||
|
|
d260c6926a | ||
|
|
e3a7aa6b6c | ||
|
|
bb50b2b6f4 | ||
|
|
c2a32bd6c1 | ||
|
|
3a9607e59b | ||
|
|
63bf986e08 | ||
|
|
76a114a3cd | ||
|
|
4159334520 | ||
|
|
8e1d18d06b | ||
|
|
4cf19458fe | ||
|
|
622dddd2c4 | ||
|
|
83517f59b4 | ||
|
|
df6c3b14dd | ||
|
|
e5595ebb2f | ||
|
|
0ac7aaabe3 | ||
|
|
973275e163 | ||
|
|
4040191101 | ||
|
|
865c26ff18 | ||
|
|
f113acee33 | ||
|
|
c8fd23caa1 | ||
|
|
8babe57d63 | ||
|
|
5af083cd8a | ||
|
|
f474bc4037 | ||
|
|
741f0a5115 | ||
|
|
8589ef50a6 | ||
|
|
ab6bac1d2c | ||
|
|
f835e86df1 | ||
|
|
ccdf9a2f0a | ||
|
|
13b4e5ff41 | ||
|
|
5c3925ab50 | ||
|
|
3bd0ad63b4 | ||
|
|
d249e5b27f | ||
|
|
880bae1eb2 | ||
|
|
bb6f153e2e | ||
|
|
e4d0e222e3 | ||
|
|
4a360d8142 | ||
|
|
4e7808ac0c | ||
|
|
1983de6528 | ||
|
|
4e8600a0ef | ||
|
|
cf6ef84271 | ||
|
|
89bd3867a9 | ||
|
|
c14f3c3902 | ||
|
|
64763293a2 | ||
|
|
657fab2787 | ||
|
|
380b15b286 | ||
|
|
93260f6cfd | ||
|
|
c93b186eda | ||
|
|
df0291db5c | ||
|
|
f5a26c5962 | ||
|
|
c66f552280 | ||
|
|
d882cb0f63 | ||
|
|
8d85a69203 | ||
|
|
61c4ed9f12 | ||
|
|
6a02e65fc2 | ||
|
|
98977f1ded | ||
|
|
45a318dfed | ||
|
|
39a29d148e | ||
|
|
2decdeadb4 | ||
|
|
a660e3ae27 | ||
|
|
8937e3fd59 | ||
|
|
c88a263a23 | ||
|
|
f9ed082e35 | ||
|
|
0e8350ea7f | ||
|
|
52ce6190ae | ||
|
|
79ca599ace | ||
|
|
9d01a7dc74 | ||
|
|
b8e472643d | ||
|
|
09cf54c731 | ||
|
|
92255f771b | ||
|
|
9e10b914c9 | ||
|
|
dce2e9b366 | ||
|
|
8c0275fe2f | ||
|
|
483a95b06b | ||
|
|
a2b0ca07cc | ||
|
|
579a7c8900 | ||
|
|
1c5d6765a1 | ||
|
|
fa22f01f39 | ||
|
|
8d4b9bc7ed | ||
|
|
3515361320 | ||
|
|
838ef636f8 | ||
|
|
cac5bccbe7 | ||
|
|
359e45a748 | ||
|
|
020b09216b | ||
|
|
ee239744d8 | ||
|
|
70825bc938 | ||
|
|
efaa95b742 | ||
|
|
b910db4f05 | ||
|
|
e46b020395 | ||
|
|
9fc1286568 | ||
|
|
62d13024f6 | ||
|
|
eeb2187b97 | ||
|
|
a50e955b3e | ||
|
|
034aaa7ef7 | ||
|
|
c721e7cfa9 | ||
|
|
f7122a766e | ||
|
|
086eb37ece | ||
|
|
05a66ce90d | ||
|
|
3d539c93eb | ||
|
|
ea5cb4fd8b | ||
|
|
cb3045b424 | ||
|
|
dfab850b61 | ||
|
|
507c6afa2c | ||
|
|
90a40d2509 | ||
|
|
fc6d6a4e9a | ||
|
|
8776cdfd5b | ||
|
|
b2931bcaa9 | ||
|
|
8bfc0c98dc | ||
|
|
ccb5e05e3e | ||
|
|
3d90f50d84 | ||
|
|
90db27e3c8 | ||
|
|
fb81e44283 | ||
|
|
55077a0bc9 | ||
|
|
68ed18d3f4 | ||
|
|
b5edcd2fae | ||
|
|
ac9cd72f28 | ||
|
|
ed99be0856 | ||
|
|
7be2923d2d | ||
|
|
a174d0000f | ||
|
|
9e8a42ca0e | ||
|
|
a174d82eb9 | ||
|
|
43c623be25 | ||
|
|
390403d957 | ||
|
|
30b68e59f2 | ||
|
|
bbdb8d36ca | ||
|
|
b4b2162ada | ||
|
|
38e76666e7 | ||
|
|
282c92c9c8 | ||
|
|
0f168dfc1a | ||
|
|
85ce672b53 | ||
|
|
c2a537ce22 | ||
|
|
d3f9fd1a60 | ||
|
|
fa0f509e18 | ||
|
|
1441a83151 | ||
|
|
a515697e08 | ||
|
|
c74eb75554 | ||
|
|
312dc95156 | ||
|
|
8645545ef4 | ||
|
|
3c4b1fb6f2 | ||
|
|
0022c1aad0 | ||
|
|
d008dd0e27 | ||
|
|
41da8e8b25 | ||
|
|
837f30cbf0 | ||
|
|
64f142a5dd | ||
|
|
5028a9632e | ||
|
|
a67e970fca | ||
|
|
ebf34ce378 | ||
|
|
a49e1bbc64 | ||
|
|
49530dc2e4 | ||
|
|
96bf06a7d8 | ||
|
|
63d8c3662a | ||
|
|
ea9316e770 | ||
|
|
dcc0886305 | ||
|
|
e7f8bca2c3 | ||
|
|
cb30450060 | ||
|
|
a1424bad6c | ||
|
|
3bf2a496e1 | ||
|
|
b6ef1e4330 | ||
|
|
d416ae86d7 | ||
|
|
b5becad63f | ||
|
|
dce4e3fb0b | ||
|
|
a978adc5a9 | ||
|
|
8072ce25c6 | ||
|
|
485057abc1 | ||
|
|
8034613beb | ||
|
|
5edaaceaf2 | ||
|
|
9893741990 | ||
|
|
7fa9a3df42 | ||
|
|
3fed6a0ab3 | ||
|
|
fd24007618 | ||
|
|
622e9741c0 | ||
|
|
8663fbba01 | ||
|
|
d94710171d | ||
|
|
21defbea9d | ||
|
|
f95ce913b1 | ||
|
|
57cddc5372 | ||
|
|
00c2caa1b7 | ||
|
|
7eb89ca67c | ||
|
|
849f343b25 | ||
|
|
e9076c0213 | ||
|
|
20578de9d0 | ||
|
|
3c5ed474af | ||
|
|
93bd9ded88 | ||
|
|
1dd904d89a | ||
|
|
76ad91f9b5 | ||
|
|
da04dc0918 | ||
|
|
2fd7fe7928 | ||
|
|
8d96111184 | ||
|
|
4061be602d | ||
|
|
41194966c7 | ||
|
|
3f1bd891e4 | ||
|
|
0a15ef022b | ||
|
|
e9d4e81f77 | ||
|
|
b9c0e345e9 | ||
|
|
2aee974e11 | ||
|
|
7b11ff1af6 | ||
|
|
4e5546cc78 | ||
|
|
9801534f11 | ||
|
|
4a7c159a44 | ||
|
|
47fba0d553 | ||
|
|
7ccc7fb393 | ||
|
|
c7e9fe7234 | ||
|
|
824e5ec3a3 | ||
|
|
d73c8bb90c | ||
|
|
02dfa1222e | ||
|
|
318cdeb005 | ||
|
|
3621f93d40 | ||
|
|
50ab988d81 | ||
|
|
74a8fee69c | ||
|
|
64eaf60b24 | ||
|
|
de3a6a8738 | ||
|
|
7d18c2c03d | ||
|
|
fc94fcb2ac | ||
|
|
a6aa5328aa | ||
|
|
f84d2db406 | ||
|
|
fa57a3db28 | ||
|
|
9d8b568438 | ||
|
|
a5a1a54c55 | ||
|
|
746939ed4f | ||
|
|
6626b8d758 | ||
|
|
33c77d03c7 | ||
|
|
509e46adc8 | ||
|
|
be4b570346 | ||
|
|
e608297c31 | ||
|
|
940be5dc6f | ||
|
|
cdd6ac9071 | ||
|
|
aa99e11e1a | ||
|
|
299511cd9d | ||
|
|
f64ffa3a56 | ||
|
|
dba21b606d | ||
|
|
3cff3a086b | ||
|
|
6476f8ade7 | ||
|
|
42bf614131 | ||
|
|
617c728a88 | ||
|
|
d1bc90b225 | ||
|
|
170f2ac27f | ||
|
|
68e1f4670b | ||
|
|
57eed11f39 | ||
|
|
d38a9f7c6d | ||
|
|
a1b5fb81fd | ||
|
|
616eb5f96a | ||
|
|
5720b63d70 | ||
|
|
dd3dc7949a | ||
|
|
198dbbdff1 | ||
|
|
8c4811ed69 | ||
|
|
bad80a64ef | ||
|
|
764736b223 | ||
|
|
fa384a7f9d | ||
|
|
ac0059cc1a | ||
|
|
63bc1b1582 | ||
|
|
e93e5ed931 | ||
|
|
f54cb21bd0 | ||
|
|
09153a154a | ||
|
|
77e77775b2 | ||
|
|
f4a44fd93c | ||
|
|
b9e20fc833 | ||
|
|
bcbea8da7d | ||
|
|
9de09f6cdf | ||
|
|
89f4db617a | ||
|
|
b5aaa6759a | ||
|
|
54bbad12f8 | ||
|
|
dc2e8f7f70 | ||
|
|
cd5f4b1534 | ||
|
|
86341c3172 | ||
|
|
91cdf64602 | ||
|
|
cad7cdfb7e | ||
|
|
2d22800a3d | ||
|
|
44d8cdbba1 | ||
|
|
64988c9be0 | ||
|
|
f6a4c2a7b3 | ||
|
|
92a0705b03 | ||
|
|
f4310862aa | ||
|
|
00804a0f81 | ||
|
|
a33f2f117e | ||
|
|
50563eef8d | ||
|
|
97a619eaf0 | ||
|
|
3df8b5829c | ||
|
|
2d0864c723 | ||
|
|
c5819478d3 | ||
|
|
af3f6dadcb | ||
|
|
9c4b69191b | ||
|
|
6dd9d54f70 | ||
|
|
d2ab44ce72 | ||
|
|
160e331035 | ||
|
|
0ee81c7526 | ||
|
|
a946a8f099 | ||
|
|
9a0dfa723a | ||
|
|
9efb6b1caf | ||
|
|
15f79d91e3 | ||
|
|
928dbd8335 | ||
|
|
d430b99562 | ||
|
|
a1e5c658d5 | ||
|
|
feb3ee0703 | ||
|
|
7bec162353 | ||
|
|
2236ae5d3b | ||
|
|
1a27c7db29 | ||
|
|
f8d114cd33 | ||
|
|
bdebb99b5a | ||
|
|
a2c6f45454 | ||
|
|
3a33090984 | ||
|
|
e3387de48f | ||
|
|
fbe58652d5 | ||
|
|
1961a0afc1 | ||
|
|
4524d9440c | ||
|
|
c1f14e2d87 | ||
|
|
0e6528a989 | ||
|
|
d2d1278a4d | ||
|
|
696434b36d | ||
|
|
b1cd5f0926 | ||
|
|
c716e4b1cb | ||
|
|
cfda531f5a | ||
|
|
c80b8140b8 | ||
|
|
34fb1c2ef5 | ||
|
|
bf23a21486 | ||
|
|
01e2d209d0 | ||
|
|
27567b49db | ||
|
|
d15ab0922b | ||
|
|
64a91f552f | ||
|
|
b1a034fbd4 | ||
|
|
61d285ba13 | ||
|
|
65c47531f6 | ||
|
|
393f44aac6 | ||
|
|
700c0fb410 | ||
|
|
346524c660 | ||
|
|
487c626e00 | ||
|
|
c5ccc0fb08 | ||
|
|
66701b9cf9 | ||
|
|
4c1d34f0e9 | ||
|
|
86cd97609d | ||
|
|
8e419132ea | ||
|
|
49814b34d3 | ||
|
|
7b71c21c12 | ||
|
|
c35c7da82a | ||
|
|
e390533760 | ||
|
|
64bee7a64f | ||
|
|
ca4e0dbc75 | ||
|
|
ee7eaff965 | ||
|
|
e512406764 | ||
|
|
a4f5ad3a94 | ||
|
|
a47068922f | ||
|
|
f8153bdacc | ||
|
|
0de800a8e5 | ||
|
|
ebcf25741b | ||
|
|
eed08f534f | ||
|
|
da5cf1867b | ||
|
|
cc5297f180 | ||
|
|
f27025aef3 | ||
|
|
595fa3d111 | ||
|
|
89051c1b90 | ||
|
|
f00ced5a33 | ||
|
|
9b003e175d | ||
|
|
a490c375f4 | ||
|
|
15644a2b0c | ||
|
|
27cf1cdf15 | ||
|
|
fef6a7ca74 | ||
|
|
5c4501efbc | ||
|
|
614a36af9f | ||
|
|
a0bc3a3626 | ||
|
|
18062eca06 | ||
|
|
1dc42d2904 | ||
|
|
500d369c50 | ||
|
|
3dd0192fe6 | ||
|
|
1eb5105b24 | ||
|
|
463865db55 | ||
|
|
ea247ca816 | ||
|
|
8864e33d1c | ||
|
|
934b16723b | ||
|
|
fc186e4d5f | ||
|
|
7d157dfeb0 | ||
|
|
977eef9138 | ||
|
|
678f1201c6 | ||
|
|
4879de263b | ||
|
|
c6208b266b | ||
|
|
2da99c2308 | ||
|
|
9ac40cd953 | ||
|
|
7522bb6fab | ||
|
|
7b520e8a9d | ||
|
|
cadb1a6a5b | ||
|
|
97c15f7ef3 | ||
|
|
9fa70c3455 | ||
|
|
8c7f6d4a76 | ||
|
|
266b4099b5 | ||
|
|
a1e68a62d0 | ||
|
|
8a010fc1f5 | ||
|
|
563fdec211 | ||
|
|
3457dcddfe | ||
|
|
57a06d2220 | ||
|
|
aa93d4fbdd | ||
|
|
d0036b2f77 | ||
|
|
1b57f8c7e2 | ||
|
|
fa96ec64e4 | ||
|
|
e89db13282 | ||
|
|
fe6577736e | ||
|
|
64537672e6 | ||
|
|
ef36aabd30 | ||
|
|
ca84732574 | ||
|
|
0b828ef1ec | ||
|
|
3359123364 | ||
|
|
cc5357a31a | ||
|
|
f1b60f76eb | ||
|
|
f29e152619 | ||
|
|
92906a500a | ||
|
|
257bd89733 | ||
|
|
1d99bb908d | ||
|
|
591b91194a | ||
|
|
2b2c831253 | ||
|
|
08777100b5 | ||
|
|
a482160691 | ||
|
|
89dd114da1 | ||
|
|
4c05ef48a7 | ||
|
|
14c89c9b63 | ||
|
|
65e3e67a83 | ||
|
|
63233a5830 | ||
|
|
4f7b710112 | ||
|
|
ac53993f70 | ||
|
|
ef750e73a2 | ||
|
|
7270eef6bf | ||
|
|
b54aaad382 | ||
|
|
fc36be4f88 | ||
|
|
aefecad4c0 | ||
|
|
c57528cbcf | ||
|
|
090294e89b | ||
|
|
a6279a0337 | ||
|
|
37b82c0d60 | ||
|
|
0dd3dd23aa | ||
|
|
4bd29b2ee8 | ||
|
|
cc79cbcadc | ||
|
|
89366d7b12 | ||
|
|
6eff08eb2d | ||
|
|
8b6b83bd62 | ||
|
|
8b6e3a0d37 | ||
|
|
8a9b26df4e | ||
|
|
fd6a3bd5d2 | ||
|
|
8085ad4b4c | ||
|
|
af24eb7dbf | ||
|
|
d1620b4e39 | ||
|
|
ba603c1937 | ||
|
|
e89dafa82e | ||
|
|
9d717b371c | ||
|
|
3d70d29672 | ||
|
|
f1efd8dbe2 | ||
|
|
159fb51518 | ||
|
|
cd64399fe5 | ||
|
|
d72e1c38ae | ||
|
|
979c49fd35 | ||
|
|
ac41b6e181 |
168
.cspell/frigate-dictionary.txt
Normal file
168
.cspell/frigate-dictionary.txt
Normal file
@@ -0,0 +1,168 @@
|
||||
rtmp
|
||||
edgetpu
|
||||
labelmap
|
||||
rockchip
|
||||
jetson
|
||||
rocm
|
||||
vaapi
|
||||
CUDA
|
||||
hwaccel
|
||||
RTSP
|
||||
Hikvision
|
||||
Dahua
|
||||
Amcrest
|
||||
Reolink
|
||||
Loryta
|
||||
Beelink
|
||||
Celeron
|
||||
vaapi
|
||||
blakeblackshear
|
||||
workdir
|
||||
onvif
|
||||
autotracking
|
||||
openvino
|
||||
tflite
|
||||
deepstack
|
||||
codeproject
|
||||
udev
|
||||
tailscale
|
||||
restream
|
||||
restreaming
|
||||
webrtc
|
||||
ssdlite
|
||||
mobilenet
|
||||
mosquitto
|
||||
datasheet
|
||||
Jellyfin
|
||||
Radeon
|
||||
libva
|
||||
Ubiquiti
|
||||
Unifi
|
||||
Tapo
|
||||
Annke
|
||||
autotracker
|
||||
autotracked
|
||||
variations
|
||||
ONVIF
|
||||
traefik
|
||||
devcontainer
|
||||
rootfs
|
||||
ffprobe
|
||||
autotrack
|
||||
logpipe
|
||||
imread
|
||||
imwrite
|
||||
imencode
|
||||
imutils
|
||||
thresholded
|
||||
timelapse
|
||||
ultrafast
|
||||
sleeptime
|
||||
radeontop
|
||||
vainfo
|
||||
tmpfs
|
||||
homography
|
||||
websockets
|
||||
LIBAVFORMAT
|
||||
NTSC
|
||||
onnxruntime
|
||||
fourcc
|
||||
radeonsi
|
||||
paho
|
||||
imagestream
|
||||
jsonify
|
||||
cgroups
|
||||
sysconf
|
||||
memlimit
|
||||
gpuload
|
||||
nvml
|
||||
setproctitle
|
||||
psutil
|
||||
Kalman
|
||||
frontdoor
|
||||
namedtuples
|
||||
zeep
|
||||
fflags
|
||||
probesize
|
||||
wallclock
|
||||
rknn
|
||||
socs
|
||||
pydantic
|
||||
shms
|
||||
imdecode
|
||||
colormap
|
||||
webui
|
||||
mse
|
||||
jsmpeg
|
||||
unreviewed
|
||||
Chromecast
|
||||
Swipeable
|
||||
flac
|
||||
scroller
|
||||
cmdline
|
||||
toggleable
|
||||
bottombar
|
||||
opencv
|
||||
apexcharts
|
||||
buildx
|
||||
mqtt
|
||||
rawvideo
|
||||
defragment
|
||||
Norfair
|
||||
subclassing
|
||||
yolo
|
||||
tensorrt
|
||||
blackshear
|
||||
stylelint
|
||||
HACS
|
||||
homeassistant
|
||||
hass
|
||||
castable
|
||||
mobiledet
|
||||
framebuffer
|
||||
mjpeg
|
||||
substream
|
||||
codeowner
|
||||
noninteractive
|
||||
restreamed
|
||||
mountpoint
|
||||
fstype
|
||||
OWASP
|
||||
iotop
|
||||
letsencrypt
|
||||
fullchain
|
||||
lsusb
|
||||
iostat
|
||||
usermod
|
||||
balena
|
||||
passwordless
|
||||
debconf
|
||||
dpkg
|
||||
poweroff
|
||||
surveillance
|
||||
qnap
|
||||
homekit
|
||||
colorspace
|
||||
quantisation
|
||||
skylake
|
||||
Cuvid
|
||||
foscam
|
||||
onnx
|
||||
numpy
|
||||
protobuf
|
||||
aarch
|
||||
amdgpu
|
||||
chipset
|
||||
referer
|
||||
mpegts
|
||||
webp
|
||||
authelia
|
||||
authentik
|
||||
unichip
|
||||
rebranded
|
||||
udevadm
|
||||
automations
|
||||
unraid
|
||||
hideable
|
||||
healthcheck
|
||||
keepalive
|
||||
@@ -10,10 +10,14 @@
|
||||
"features": {
|
||||
"ghcr.io/devcontainers/features/common-utils:1": {}
|
||||
},
|
||||
"forwardPorts": [5000, 5001, 5173, 1935, 8554, 8555],
|
||||
"forwardPorts": [8080, 5000, 5001, 5173, 8554, 8555],
|
||||
"portsAttributes": {
|
||||
"8080": {
|
||||
"label": "External NGINX",
|
||||
"onAutoForward": "silent"
|
||||
},
|
||||
"5000": {
|
||||
"label": "NGINX",
|
||||
"label": "Internal NGINX",
|
||||
"onAutoForward": "silent"
|
||||
},
|
||||
"5001": {
|
||||
@@ -24,10 +28,6 @@
|
||||
"label": "Vite Server",
|
||||
"onAutoForward": "silent"
|
||||
},
|
||||
"1935": {
|
||||
"label": "RTMP",
|
||||
"onAutoForward": "silent"
|
||||
},
|
||||
"8554": {
|
||||
"label": "gortc RTSP",
|
||||
"onAutoForward": "silent"
|
||||
@@ -42,7 +42,6 @@
|
||||
"extensions": [
|
||||
"ms-python.python",
|
||||
"ms-python.vscode-pylance",
|
||||
"ms-python.black-formatter",
|
||||
"visualstudioexptteam.vscodeintellicode",
|
||||
"mhutchie.git-graph",
|
||||
"ms-azuretools.vscode-docker",
|
||||
@@ -53,13 +52,10 @@
|
||||
"csstools.postcss",
|
||||
"blanu.vscode-styled-jsx",
|
||||
"bradlc.vscode-tailwindcss",
|
||||
"ms-python.isort",
|
||||
"charliermarsh.ruff"
|
||||
],
|
||||
"settings": {
|
||||
"remote.autoForwardPorts": false,
|
||||
"python.linting.pylintEnabled": true,
|
||||
"python.linting.enabled": true,
|
||||
"python.formatting.provider": "none",
|
||||
"python.languageServer": "Pylance",
|
||||
"editor.formatOnPaste": false,
|
||||
@@ -72,7 +68,7 @@
|
||||
"eslint.workingDirectories": ["./web"],
|
||||
"isort.args": ["--settings-path=./pyproject.toml"],
|
||||
"[python]": {
|
||||
"editor.defaultFormatter": "ms-python.black-formatter",
|
||||
"editor.defaultFormatter": "charliermarsh.ruff",
|
||||
"editor.formatOnSave": true,
|
||||
"editor.codeActionsOnSave": {
|
||||
"source.fixAll": true,
|
||||
|
||||
@@ -1,8 +1,5 @@
|
||||
name: Camera Support Request
|
||||
description: Support for setting up cameras in Frigate
|
||||
title: "[Camera Support]: "
|
||||
labels: ["support", "triage"]
|
||||
assignees: []
|
||||
body:
|
||||
- type: textarea
|
||||
id: description
|
||||
@@ -14,7 +11,7 @@ body:
|
||||
id: version
|
||||
attributes:
|
||||
label: Version
|
||||
description: Visible on the Debug page in the Web UI
|
||||
description: Visible on the System page in the Web UI
|
||||
validations:
|
||||
required: true
|
||||
- type: textarea
|
||||
@@ -1,8 +1,5 @@
|
||||
name: Config Support Request
|
||||
description: Support for Frigate configuration
|
||||
title: "[Config Support]: "
|
||||
labels: ["support", "triage"]
|
||||
assignees: []
|
||||
body:
|
||||
- type: textarea
|
||||
id: description
|
||||
@@ -14,7 +11,7 @@ body:
|
||||
id: version
|
||||
attributes:
|
||||
label: Version
|
||||
description: Visible on the Debug page in the Web UI
|
||||
description: Visible on the System page in the Web UI
|
||||
validations:
|
||||
required: true
|
||||
- type: textarea
|
||||
@@ -1,8 +1,5 @@
|
||||
name: Detector Support Request
|
||||
description: Support for setting up object detector in Frigate (Coral, OpenVINO, TensorRT, etc.)
|
||||
title: "[Detector Support]: "
|
||||
labels: ["support", "triage"]
|
||||
assignees: []
|
||||
body:
|
||||
- type: textarea
|
||||
id: description
|
||||
@@ -14,7 +11,7 @@ body:
|
||||
id: version
|
||||
attributes:
|
||||
label: Version
|
||||
description: Visible on the Debug page in the Web UI
|
||||
description: Visible on the System page in the Web UI
|
||||
validations:
|
||||
required: true
|
||||
- type: textarea
|
||||
@@ -1,8 +1,5 @@
|
||||
name: General Support Request
|
||||
description: General support request for Frigate
|
||||
title: "[Support]: "
|
||||
labels: ["support", "triage"]
|
||||
assignees: []
|
||||
body:
|
||||
- type: textarea
|
||||
id: description
|
||||
@@ -14,7 +11,7 @@ body:
|
||||
id: version
|
||||
attributes:
|
||||
label: Version
|
||||
description: Visible on the Debug page in the Web UI
|
||||
description: Visible on the System page in the Web UI
|
||||
validations:
|
||||
required: true
|
||||
- type: textarea
|
||||
@@ -1,8 +1,5 @@
|
||||
name: Hardware Acceleration Support Request
|
||||
description: Support for setting up GPU hardware acceleration in Frigate
|
||||
title: "[HW Accel Support]: "
|
||||
labels: ["support", "triage"]
|
||||
assignees: []
|
||||
body:
|
||||
- type: textarea
|
||||
id: description
|
||||
@@ -14,7 +11,7 @@ body:
|
||||
id: version
|
||||
attributes:
|
||||
label: Version
|
||||
description: Visible on the Debug page in the Web UI
|
||||
description: Visible on the System page in the Web UI
|
||||
validations:
|
||||
required: true
|
||||
- type: textarea
|
||||
9
.github/DISCUSSION_TEMPLATE/question.yml
vendored
Normal file
9
.github/DISCUSSION_TEMPLATE/question.yml
vendored
Normal file
@@ -0,0 +1,9 @@
|
||||
title: "[Question]: "
|
||||
labels: ["question"]
|
||||
body:
|
||||
- type: textarea
|
||||
id: description
|
||||
attributes:
|
||||
label: "What is your question:"
|
||||
validations:
|
||||
required: true
|
||||
4
.github/ISSUE_TEMPLATE/config.yml
vendored
4
.github/ISSUE_TEMPLATE/config.yml
vendored
@@ -1 +1,5 @@
|
||||
blank_issues_enabled: false
|
||||
contact_links:
|
||||
- name: Frigate Support
|
||||
url: https://github.com/blakeblackshear/frigate/discussions/new/choose
|
||||
about: Get support for setting up or troubelshooting Frigate.
|
||||
|
||||
21
.github/actions/setup/action.yml
vendored
21
.github/actions/setup/action.yml
vendored
@@ -11,11 +11,22 @@ outputs:
|
||||
runs:
|
||||
using: "composite"
|
||||
steps:
|
||||
- name: Remove unnecessary files
|
||||
run: |
|
||||
sudo rm -rf /usr/share/dotnet
|
||||
sudo rm -rf /usr/local/lib/android
|
||||
sudo rm -rf /opt/ghc
|
||||
# Stop docker so we can mount more space at /var/lib/docker
|
||||
- name: Stop docker
|
||||
run: sudo systemctl stop docker
|
||||
shell: bash
|
||||
# This creates a virtual volume at /var/lib/docker to maximize the size
|
||||
# As of 2/14/2024, this results in 97G for docker images
|
||||
- name: Maximize build space
|
||||
uses: easimon/maximize-build-space@master
|
||||
with:
|
||||
remove-dotnet: 'true'
|
||||
remove-android: 'true'
|
||||
remove-haskell: 'true'
|
||||
remove-codeql: 'true'
|
||||
build-mount-path: '/var/lib/docker'
|
||||
- name: Start docker
|
||||
run: sudo systemctl start docker
|
||||
shell: bash
|
||||
- id: lowercaseRepo
|
||||
uses: ASzc/change-string-case-action@v5
|
||||
|
||||
8
.github/dependabot.yml
vendored
8
.github/dependabot.yml
vendored
@@ -18,6 +18,12 @@ updates:
|
||||
interval: daily
|
||||
open-pull-requests-limit: 10
|
||||
target-branch: dev
|
||||
- package-ecosystem: "pip"
|
||||
directory: "/docker/tensorrt"
|
||||
schedule:
|
||||
interval: daily
|
||||
open-pull-requests-limit: 10
|
||||
target-branch: dev
|
||||
- package-ecosystem: "npm"
|
||||
directory: "/web"
|
||||
schedule:
|
||||
@@ -28,5 +34,7 @@ updates:
|
||||
directory: "/docs"
|
||||
schedule:
|
||||
interval: daily
|
||||
allow:
|
||||
- dependency-name: "@docusaurus/*"
|
||||
open-pull-requests-limit: 10
|
||||
target-branch: dev
|
||||
|
||||
107
.github/workflows/ci.yml
vendored
107
.github/workflows/ci.yml
vendored
@@ -37,16 +37,6 @@ jobs:
|
||||
target: frigate
|
||||
tags: ${{ steps.setup.outputs.image-name }}-amd64
|
||||
cache-from: type=registry,ref=${{ steps.setup.outputs.cache-name }}-amd64
|
||||
- name: Build and push TensorRT (x86 GPU)
|
||||
uses: docker/bake-action@v4
|
||||
with:
|
||||
push: true
|
||||
targets: tensorrt
|
||||
files: docker/tensorrt/trt.hcl
|
||||
set: |
|
||||
tensorrt.tags=${{ steps.setup.outputs.image-name }}-tensorrt
|
||||
*.cache-from=type=registry,ref=${{ steps.setup.outputs.cache-name }}-amd64
|
||||
*.cache-to=type=registry,ref=${{ steps.setup.outputs.cache-name }}-amd64,mode=max
|
||||
arm64_build:
|
||||
runs-on: ubuntu-latest
|
||||
name: ARM Build
|
||||
@@ -79,6 +69,15 @@ jobs:
|
||||
rpi.tags=${{ steps.setup.outputs.image-name }}-rpi
|
||||
*.cache-from=type=registry,ref=${{ steps.setup.outputs.cache-name }}-arm64
|
||||
*.cache-to=type=registry,ref=${{ steps.setup.outputs.cache-name }}-arm64,mode=max
|
||||
- name: Build and push Rockchip build
|
||||
uses: docker/bake-action@v3
|
||||
with:
|
||||
push: true
|
||||
targets: rk
|
||||
files: docker/rockchip/rk.hcl
|
||||
set: |
|
||||
rk.tags=${{ steps.setup.outputs.image-name }}-rk
|
||||
*.cache-from=type=gha
|
||||
jetson_jp4_build:
|
||||
runs-on: ubuntu-latest
|
||||
name: Jetson Jetpack 4
|
||||
@@ -131,6 +130,82 @@ jobs:
|
||||
tensorrt.tags=${{ steps.setup.outputs.image-name }}-tensorrt-jp5
|
||||
*.cache-from=type=registry,ref=${{ steps.setup.outputs.cache-name }}-jp5
|
||||
*.cache-to=type=registry,ref=${{ steps.setup.outputs.cache-name }}-jp5,mode=max
|
||||
amd64_extra_builds:
|
||||
runs-on: ubuntu-latest
|
||||
name: AMD64 Extra Build
|
||||
needs:
|
||||
- amd64_build
|
||||
steps:
|
||||
- name: Check out code
|
||||
uses: actions/checkout@v4
|
||||
- name: Set up QEMU and Buildx
|
||||
id: setup
|
||||
uses: ./.github/actions/setup
|
||||
with:
|
||||
GITHUB_TOKEN: ${{ secrets.GITHUB_TOKEN }}
|
||||
- name: Build and push TensorRT (x86 GPU)
|
||||
env:
|
||||
COMPUTE_LEVEL: "50 60 70 80 90"
|
||||
uses: docker/bake-action@v4
|
||||
with:
|
||||
push: true
|
||||
targets: tensorrt
|
||||
files: docker/tensorrt/trt.hcl
|
||||
set: |
|
||||
tensorrt.tags=${{ steps.setup.outputs.image-name }}-tensorrt
|
||||
*.cache-from=type=registry,ref=${{ steps.setup.outputs.cache-name }}-amd64
|
||||
*.cache-to=type=registry,ref=${{ steps.setup.outputs.cache-name }}-amd64,mode=max
|
||||
#- name: AMD/ROCm general build
|
||||
# env:
|
||||
# AMDGPU: gfx
|
||||
# HSA_OVERRIDE: 0
|
||||
# uses: docker/bake-action@v3
|
||||
# with:
|
||||
# push: true
|
||||
# targets: rocm
|
||||
# files: docker/rocm/rocm.hcl
|
||||
# set: |
|
||||
# rocm.tags=${{ steps.setup.outputs.image-name }}-rocm
|
||||
# *.cache-from=type=gha
|
||||
#- name: AMD/ROCm gfx900
|
||||
# env:
|
||||
# AMDGPU: gfx900
|
||||
# HSA_OVERRIDE: 1
|
||||
# HSA_OVERRIDE_GFX_VERSION: 9.0.0
|
||||
# uses: docker/bake-action@v3
|
||||
# with:
|
||||
# push: true
|
||||
# targets: rocm
|
||||
# files: docker/rocm/rocm.hcl
|
||||
# set: |
|
||||
# rocm.tags=${{ steps.setup.outputs.image-name }}-rocm-gfx900
|
||||
# *.cache-from=type=gha
|
||||
#- name: AMD/ROCm gfx1030
|
||||
# env:
|
||||
# AMDGPU: gfx1030
|
||||
# HSA_OVERRIDE: 1
|
||||
# HSA_OVERRIDE_GFX_VERSION: 10.3.0
|
||||
# uses: docker/bake-action@v3
|
||||
# with:
|
||||
# push: true
|
||||
# targets: rocm
|
||||
# files: docker/rocm/rocm.hcl
|
||||
# set: |
|
||||
# rocm.tags=${{ steps.setup.outputs.image-name }}-rocm-gfx1030
|
||||
# *.cache-from=type=gha
|
||||
#- name: AMD/ROCm gfx1100
|
||||
# env:
|
||||
# AMDGPU: gfx1100
|
||||
# HSA_OVERRIDE: 1
|
||||
# HSA_OVERRIDE_GFX_VERSION: 11.0.0
|
||||
# uses: docker/bake-action@v3
|
||||
# with:
|
||||
# push: true
|
||||
# targets: rocm
|
||||
# files: docker/rocm/rocm.hcl
|
||||
# set: |
|
||||
# rocm.tags=${{ steps.setup.outputs.image-name }}-rocm-gfx1100
|
||||
# *.cache-from=type=gha
|
||||
# The majority of users running arm64 are rpi users, so the rpi
|
||||
# build should be the primary arm64 image
|
||||
assemble_default_build:
|
||||
@@ -141,20 +216,20 @@ jobs:
|
||||
- arm64_build
|
||||
steps:
|
||||
- id: lowercaseRepo
|
||||
uses: ASzc/change-string-case-action@v5
|
||||
uses: ASzc/change-string-case-action@v6
|
||||
with:
|
||||
string: ${{ github.repository }}
|
||||
- name: Log in to the Container registry
|
||||
uses: docker/login-action@343f7c4344506bcbf9b4de18042ae17996df046d
|
||||
uses: docker/login-action@e92390c5fb421da1463c202d546fed0ec5c39f20
|
||||
with:
|
||||
registry: ghcr.io
|
||||
username: ${{ github.actor }}
|
||||
password: ${{ secrets.GITHUB_TOKEN }}
|
||||
- name: Create short sha
|
||||
run: echo "SHORT_SHA=${GITHUB_SHA::7}" >> $GITHUB_ENV
|
||||
- uses: int128/docker-manifest-create-action@v1
|
||||
- uses: int128/docker-manifest-create-action@v2
|
||||
with:
|
||||
tags: ghcr.io/${{ steps.lowercaseRepo.outputs.lowercase }}:${{ github.ref_name }}-${{ env.SHORT_SHA }}
|
||||
suffixes: |
|
||||
-amd64
|
||||
-rpi
|
||||
sources: |
|
||||
ghcr.io/${{ steps.lowercaseRepo.outputs.lowercase }}:${{ github.ref_name }}-${{ env.SHORT_SHA }}-amd64
|
||||
ghcr.io/${{ steps.lowercaseRepo.outputs.lowercase }}:${{ github.ref_name }}-${{ env.SHORT_SHA }}-rpi
|
||||
|
||||
2
.github/workflows/dependabot-auto-merge.yaml
vendored
2
.github/workflows/dependabot-auto-merge.yaml
vendored
@@ -11,7 +11,7 @@ jobs:
|
||||
steps:
|
||||
- name: Get Dependabot metadata
|
||||
id: metadata
|
||||
uses: dependabot/fetch-metadata@v1
|
||||
uses: dependabot/fetch-metadata@v2
|
||||
with:
|
||||
github-token: ${{ secrets.GITHUB_TOKEN }}
|
||||
- name: Enable auto-merge for Dependabot PRs
|
||||
|
||||
19
.github/workflows/pull_request.yml
vendored
19
.github/workflows/pull_request.yml
vendored
@@ -51,12 +51,12 @@ jobs:
|
||||
- uses: actions/checkout@v4
|
||||
- uses: actions/setup-node@master
|
||||
with:
|
||||
node-version: 16.x
|
||||
node-version: 20.x
|
||||
- run: npm install
|
||||
working-directory: ./web
|
||||
- name: Test
|
||||
run: npm run test
|
||||
working-directory: ./web
|
||||
# - name: Test
|
||||
# run: npm run test
|
||||
# working-directory: ./web
|
||||
|
||||
python_checks:
|
||||
runs-on: ubuntu-latest
|
||||
@@ -65,20 +65,17 @@ jobs:
|
||||
- name: Check out the repository
|
||||
uses: actions/checkout@v4
|
||||
- name: Set up Python ${{ env.DEFAULT_PYTHON }}
|
||||
uses: actions/setup-python@v4.7.1
|
||||
uses: actions/setup-python@v5.1.0
|
||||
with:
|
||||
python-version: ${{ env.DEFAULT_PYTHON }}
|
||||
- name: Install requirements
|
||||
run: |
|
||||
python3 -m pip install -U pip
|
||||
python3 -m pip install -r docker/main/requirements-dev.txt
|
||||
- name: Check black
|
||||
- name: Check formatting
|
||||
run: |
|
||||
black --check --diff frigate migrations docker *.py
|
||||
- name: Check isort
|
||||
run: |
|
||||
isort --check --diff frigate migrations docker *.py
|
||||
- name: Check ruff
|
||||
ruff format --check --diff frigate migrations docker *.py
|
||||
- name: Check lint
|
||||
run: |
|
||||
ruff check frigate migrations docker *.py
|
||||
|
||||
|
||||
37
.github/workflows/release.yml
vendored
Normal file
37
.github/workflows/release.yml
vendored
Normal file
@@ -0,0 +1,37 @@
|
||||
name: On release
|
||||
|
||||
on:
|
||||
workflow_dispatch:
|
||||
release:
|
||||
types: [published]
|
||||
|
||||
jobs:
|
||||
release:
|
||||
runs-on: ubuntu-latest
|
||||
|
||||
steps:
|
||||
- uses: actions/checkout@v4
|
||||
- id: lowercaseRepo
|
||||
uses: ASzc/change-string-case-action@v6
|
||||
with:
|
||||
string: ${{ github.repository }}
|
||||
- name: Log in to the Container registry
|
||||
uses: docker/login-action@e92390c5fb421da1463c202d546fed0ec5c39f20
|
||||
with:
|
||||
registry: ghcr.io
|
||||
username: ${{ github.actor }}
|
||||
password: ${{ secrets.GITHUB_TOKEN }}
|
||||
- name: Create tag variables
|
||||
run: |
|
||||
BRANCH=$([[ "${{ github.ref_name }}" =~ ^v[0-9]+\.[0-9]+\.[0-9]+$ ]] && echo "master" || echo "dev")
|
||||
echo "BASE=ghcr.io/${{ steps.lowercaseRepo.outputs.lowercase }}" >> $GITHUB_ENV
|
||||
echo "BUILD_TAG=${BRANCH}-${GITHUB_SHA::7}" >> $GITHUB_ENV
|
||||
echo "CLEAN_VERSION=$(echo ${GITHUB_REF##*/} | tr '[:upper:]' '[:lower:]' | sed 's/^[v]//')" >> $GITHUB_ENV
|
||||
- name: Tag and push the main image
|
||||
run: |
|
||||
VERSION_TAG=${BASE}:${CLEAN_VERSION}
|
||||
PULL_TAG=${BASE}:${BUILD_TAG}
|
||||
docker run --rm -v $HOME/.docker/config.json:/config.json quay.io/skopeo/stable:latest copy --authfile /config.json --multi-arch all docker://${PULL_TAG} docker://${VERSION_TAG}
|
||||
for variant in standard-arm64 tensorrt tensorrt-jp4 tensorrt-jp5 rk; do
|
||||
docker run --rm -v $HOME/.docker/config.json:/config.json quay.io/skopeo/stable:latest copy --authfile /config.json --multi-arch all docker://${PULL_TAG}-${variant} docker://${VERSION_TAG}-${variant}
|
||||
done
|
||||
15
.github/workflows/stale.yml
vendored
15
.github/workflows/stale.yml
vendored
@@ -24,3 +24,18 @@ jobs:
|
||||
operations-per-run: 120
|
||||
- name: Print outputs
|
||||
run: echo ${{ join(steps.stale.outputs.*, ',') }}
|
||||
|
||||
clean_ghcr:
|
||||
name: Delete outdated dev container images
|
||||
runs-on: ubuntu-latest
|
||||
steps:
|
||||
- name: Delete old images
|
||||
uses: snok/container-retention-policy@v2
|
||||
with:
|
||||
image-names: dev-*
|
||||
cut-off: 60 days ago UTC
|
||||
keep-at-least: 5
|
||||
account-type: personal
|
||||
token: ${{ secrets.GITHUB_TOKEN }}
|
||||
token-type: github-token
|
||||
|
||||
|
||||
1
.gitignore
vendored
1
.gitignore
vendored
@@ -8,7 +8,6 @@ config/*
|
||||
!config/*.example
|
||||
models
|
||||
*.mp4
|
||||
*.ts
|
||||
*.db
|
||||
*.csv
|
||||
frigate/version.py
|
||||
|
||||
@@ -2,3 +2,5 @@
|
||||
/docker/tensorrt/ @madsciencetist @NateMeyer
|
||||
/docker/tensorrt/*arm64* @madsciencetist
|
||||
/docker/tensorrt/*jetson* @madsciencetist
|
||||
/docker/rockchip/ @MarcA711
|
||||
/docker/rocm/ @harakas
|
||||
|
||||
2
Makefile
2
Makefile
@@ -1,7 +1,7 @@
|
||||
default_target: local
|
||||
|
||||
COMMIT_HASH := $(shell git log -1 --pretty=format:"%h"|tail -1)
|
||||
VERSION = 0.13.0
|
||||
VERSION = 0.14.0
|
||||
IMAGE_REPO ?= ghcr.io/blakeblackshear/frigate
|
||||
GITHUB_REF_NAME ?= $(shell git rev-parse --abbrev-ref HEAD)
|
||||
CURRENT_UID := $(shell id -u)
|
||||
|
||||
21
cspell.json
Normal file
21
cspell.json
Normal file
@@ -0,0 +1,21 @@
|
||||
{
|
||||
"version": "0.2",
|
||||
"ignorePaths": [
|
||||
"Dockerfile",
|
||||
"Dockerfile.*",
|
||||
"CMakeLists.txt",
|
||||
"*.db",
|
||||
"node_modules",
|
||||
"__pycache__",
|
||||
"dist"
|
||||
],
|
||||
"language": "en",
|
||||
"dictionaryDefinitions": [
|
||||
{
|
||||
"name": "frigate-dictionary",
|
||||
"path": "./.cspell/frigate-dictionary.txt",
|
||||
"addWords": true
|
||||
}
|
||||
],
|
||||
"dictionaries": ["frigate-dictionary"]
|
||||
}
|
||||
@@ -14,13 +14,14 @@ services:
|
||||
dockerfile: docker/main/Dockerfile
|
||||
# Use target devcontainer-trt for TensorRT dev
|
||||
target: devcontainer
|
||||
deploy:
|
||||
resources:
|
||||
reservations:
|
||||
devices:
|
||||
- driver: nvidia
|
||||
count: 1
|
||||
capabilities: [gpu]
|
||||
## Uncomment this block for nvidia gpu support
|
||||
# deploy:
|
||||
# resources:
|
||||
# reservations:
|
||||
# devices:
|
||||
# - driver: nvidia
|
||||
# count: 1
|
||||
# capabilities: [gpu]
|
||||
environment:
|
||||
YOLO_MODELS: yolov7-320
|
||||
devices:
|
||||
|
||||
@@ -33,7 +33,7 @@ RUN --mount=type=tmpfs,target=/tmp --mount=type=tmpfs,target=/var/cache/apt \
|
||||
FROM scratch AS go2rtc
|
||||
ARG TARGETARCH
|
||||
WORKDIR /rootfs/usr/local/go2rtc/bin
|
||||
ADD --link --chmod=755 "https://github.com/AlexxIT/go2rtc/releases/download/v1.8.1/go2rtc_linux_${TARGETARCH}" go2rtc
|
||||
ADD --link --chmod=755 "https://github.com/AlexxIT/go2rtc/releases/download/v1.9.2/go2rtc_linux_${TARGETARCH}" go2rtc
|
||||
|
||||
|
||||
####
|
||||
@@ -51,7 +51,7 @@ ARG DEBIAN_FRONTEND
|
||||
# Install OpenVino Runtime and Dev library
|
||||
COPY docker/main/requirements-ov.txt /requirements-ov.txt
|
||||
RUN apt-get -qq update \
|
||||
&& apt-get -qq install -y wget python3 python3-distutils \
|
||||
&& apt-get -qq install -y wget python3 python3-dev python3-distutils gcc pkg-config libhdf5-dev \
|
||||
&& wget -q https://bootstrap.pypa.io/get-pip.py -O get-pip.py \
|
||||
&& python3 get-pip.py "pip" \
|
||||
&& pip install -r /requirements-ov.txt
|
||||
@@ -191,12 +191,13 @@ COPY --from=deps-rootfs / /
|
||||
RUN ldconfig
|
||||
|
||||
EXPOSE 5000
|
||||
EXPOSE 1935
|
||||
EXPOSE 8554
|
||||
EXPOSE 8555/tcp 8555/udp
|
||||
|
||||
# Configure logging to prepend timestamps, log to stdout, keep 0 archives and rotate on 10MB
|
||||
ENV S6_LOGGING_SCRIPT="T 1 n0 s10000000 T"
|
||||
# Do not fail on long-running download scripts
|
||||
ENV S6_CMD_WAIT_FOR_SERVICES_MAXTIME=0
|
||||
|
||||
ENTRYPOINT ["/init"]
|
||||
CMD []
|
||||
@@ -215,13 +216,13 @@ COPY docker/main/fake_frigate_run /etc/s6-overlay/s6-rc.d/frigate/run
|
||||
RUN mkdir -p /opt/frigate \
|
||||
&& ln -svf /workspace/frigate/frigate /opt/frigate/frigate
|
||||
|
||||
# Install Node 16
|
||||
RUN apt-get update \
|
||||
&& apt-get install wget -y \
|
||||
&& wget -qO- https://deb.nodesource.com/setup_16.x | bash - \
|
||||
&& apt-get install -y nodejs \
|
||||
# Install Node 20
|
||||
RUN curl -SLO https://deb.nodesource.com/nsolid_setup_deb.sh && \
|
||||
chmod 500 nsolid_setup_deb.sh && \
|
||||
./nsolid_setup_deb.sh 20 && \
|
||||
apt-get install nodejs -y \
|
||||
&& rm -rf /var/lib/apt/lists/* \
|
||||
&& npm install -g npm@9
|
||||
&& npm install -g npm@10
|
||||
|
||||
WORKDIR /workspace/frigate
|
||||
|
||||
@@ -232,12 +233,14 @@ RUN apt-get update \
|
||||
RUN --mount=type=bind,source=./docker/main/requirements-dev.txt,target=/workspace/frigate/requirements-dev.txt \
|
||||
pip3 install -r requirements-dev.txt
|
||||
|
||||
HEALTHCHECK NONE
|
||||
|
||||
CMD ["sleep", "infinity"]
|
||||
|
||||
|
||||
# Frigate web build
|
||||
# This should be architecture agnostic, so speed up the build on multiarch by not using QEMU.
|
||||
FROM --platform=$BUILDPLATFORM node:16 AS web-build
|
||||
FROM --platform=$BUILDPLATFORM node:20 AS web-build
|
||||
|
||||
WORKDIR /work
|
||||
COPY web/package.json web/package-lock.json ./
|
||||
|
||||
@@ -2,10 +2,11 @@
|
||||
|
||||
set -euxo pipefail
|
||||
|
||||
NGINX_VERSION="1.25.2"
|
||||
NGINX_VERSION="1.25.3"
|
||||
VOD_MODULE_VERSION="1.31"
|
||||
SECURE_TOKEN_MODULE_VERSION="1.5"
|
||||
RTMP_MODULE_VERSION="1.2.2"
|
||||
SET_MISC_MODULE_VERSION="v0.33"
|
||||
NGX_DEVEL_KIT_VERSION="v0.3.3"
|
||||
|
||||
cp /etc/apt/sources.list /etc/apt/sources.list.d/sources-src.list
|
||||
sed -i 's|deb http|deb-src http|g' /etc/apt/sources.list.d/sources-src.list
|
||||
@@ -49,10 +50,16 @@ mkdir /tmp/nginx-secure-token-module
|
||||
wget https://github.com/kaltura/nginx-secure-token-module/archive/refs/tags/${SECURE_TOKEN_MODULE_VERSION}.tar.gz
|
||||
tar -zxf ${SECURE_TOKEN_MODULE_VERSION}.tar.gz -C /tmp/nginx-secure-token-module --strip-components=1
|
||||
rm ${SECURE_TOKEN_MODULE_VERSION}.tar.gz
|
||||
mkdir /tmp/nginx-rtmp-module
|
||||
wget -nv https://github.com/arut/nginx-rtmp-module/archive/refs/tags/v${RTMP_MODULE_VERSION}.tar.gz
|
||||
tar -zxf v${RTMP_MODULE_VERSION}.tar.gz -C /tmp/nginx-rtmp-module --strip-components=1
|
||||
rm v${RTMP_MODULE_VERSION}.tar.gz
|
||||
|
||||
mkdir /tmp/ngx_devel_kit
|
||||
wget https://github.com/vision5/ngx_devel_kit/archive/refs/tags/${NGX_DEVEL_KIT_VERSION}.tar.gz
|
||||
tar -zxf ${NGX_DEVEL_KIT_VERSION}.tar.gz -C /tmp/ngx_devel_kit --strip-components=1
|
||||
rm ${NGX_DEVEL_KIT_VERSION}.tar.gz
|
||||
|
||||
mkdir /tmp/nginx-set-misc-module
|
||||
wget https://github.com/openresty/set-misc-nginx-module/archive/refs/tags/${SET_MISC_MODULE_VERSION}.tar.gz
|
||||
tar -zxf ${SET_MISC_MODULE_VERSION}.tar.gz -C /tmp/nginx-set-misc-module --strip-components=1
|
||||
rm ${SET_MISC_MODULE_VERSION}.tar.gz
|
||||
|
||||
cd /tmp/nginx
|
||||
|
||||
@@ -60,10 +67,13 @@ cd /tmp/nginx
|
||||
--with-file-aio \
|
||||
--with-http_sub_module \
|
||||
--with-http_ssl_module \
|
||||
--with-http_auth_request_module \
|
||||
--with-http_realip_module \
|
||||
--with-threads \
|
||||
--add-module=../ngx_devel_kit \
|
||||
--add-module=../nginx-set-misc-module \
|
||||
--add-module=../nginx-vod-module \
|
||||
--add-module=../nginx-secure-token-module \
|
||||
--add-module=../nginx-rtmp-module \
|
||||
--with-cc-opt="-O3 -Wno-error=implicit-fallthrough"
|
||||
|
||||
make CC="ccache gcc" -j$(nproc) && make install
|
||||
|
||||
@@ -1,3 +1 @@
|
||||
black == 23.10.*
|
||||
isort
|
||||
ruff
|
||||
|
||||
@@ -1,28 +1,35 @@
|
||||
click == 8.1.*
|
||||
Flask == 2.3.*
|
||||
Flask == 3.0.*
|
||||
Flask_Limiter == 3.7.*
|
||||
imutils == 0.5.*
|
||||
matplotlib == 3.7.*
|
||||
joserfc == 0.10.*
|
||||
markupsafe == 2.1.*
|
||||
matplotlib == 3.8.*
|
||||
mypy == 1.6.1
|
||||
numpy == 1.23.*
|
||||
numpy == 1.26.*
|
||||
onvif_zeep == 0.2.12
|
||||
opencv-python-headless == 4.7.0.*
|
||||
paho-mqtt == 1.6.*
|
||||
opencv-python-headless == 4.9.0.*
|
||||
paho-mqtt == 2.1.*
|
||||
pandas == 2.2.*
|
||||
peewee == 3.17.*
|
||||
peewee_migrate == 1.12.*
|
||||
psutil == 5.9.*
|
||||
pydantic == 1.10.*
|
||||
pydantic == 2.7.*
|
||||
git+https://github.com/fbcotter/py3nvml#egg=py3nvml
|
||||
PyYAML == 6.0.*
|
||||
pytz == 2023.3
|
||||
ruamel.yaml == 0.17.*
|
||||
tzlocal == 5.1
|
||||
pytz == 2024.1
|
||||
pyzmq == 26.0.*
|
||||
ruamel.yaml == 0.18.*
|
||||
tzlocal == 5.2
|
||||
types-PyYAML == 6.0.*
|
||||
requests == 2.31.*
|
||||
types-requests == 2.31.*
|
||||
scipy == 1.11.*
|
||||
requests == 2.32.*
|
||||
types-requests == 2.32.*
|
||||
scipy == 1.13.*
|
||||
norfair == 2.2.*
|
||||
setproctitle == 1.3.*
|
||||
ws4py == 0.5.*
|
||||
unidecode == 1.3.*
|
||||
onnxruntime == 1.16.*
|
||||
# Openvino Library - Custom built with MYRIAD support
|
||||
openvino @ https://github.com/NateMeyer/openvino-wheels/releases/download/multi-arch_2022.3.1/openvino-2022.3.1-1-cp39-cp39-manylinux_2_31_x86_64.whl; platform_machine == 'x86_64'
|
||||
openvino @ https://github.com/NateMeyer/openvino-wheels/releases/download/multi-arch_2022.3.1/openvino-2022.3.1-1-cp39-cp39-linux_aarch64.whl; platform_machine == 'aarch64'
|
||||
|
||||
@@ -45,8 +45,13 @@ function get_ip_and_port_from_supervisor() {
|
||||
|
||||
export LIBAVFORMAT_VERSION_MAJOR=$(ffmpeg -version | grep -Po 'libavformat\W+\K\d+')
|
||||
|
||||
if [[ -f "/dev/shm/go2rtc.yaml" ]]; then
|
||||
echo "[INFO] Removing stale config from last run..."
|
||||
rm /dev/shm/go2rtc.yaml
|
||||
fi
|
||||
|
||||
if [[ ! -f "/dev/shm/go2rtc.yaml" ]]; then
|
||||
echo "[INFO] Preparing go2rtc config..."
|
||||
echo "[INFO] Preparing new go2rtc config..."
|
||||
|
||||
if [[ -n "${SUPERVISOR_TOKEN:-}" ]]; then
|
||||
# Running as a Home Assistant add-on, infer the IP address and port
|
||||
@@ -54,6 +59,8 @@ if [[ ! -f "/dev/shm/go2rtc.yaml" ]]; then
|
||||
fi
|
||||
|
||||
python3 /usr/local/go2rtc/create_config.py
|
||||
else
|
||||
echo "[WARNING] Unable to remove existing go2rtc config. Changes made to your frigate config file may not be recognized. Please remove the /dev/shm/go2rtc.yaml from your docker host manually."
|
||||
fi
|
||||
|
||||
readonly config_path="/config"
|
||||
|
||||
@@ -3,6 +3,7 @@
|
||||
import json
|
||||
import os
|
||||
import sys
|
||||
from pathlib import Path
|
||||
|
||||
import yaml
|
||||
|
||||
@@ -16,6 +17,14 @@ sys.path.remove("/opt/frigate")
|
||||
|
||||
|
||||
FRIGATE_ENV_VARS = {k: v for k, v in os.environ.items() if k.startswith("FRIGATE_")}
|
||||
# read docker secret files as env vars too
|
||||
if os.path.isdir("/run/secrets"):
|
||||
for secret_file in os.listdir("/run/secrets"):
|
||||
if secret_file.startswith("FRIGATE_"):
|
||||
FRIGATE_ENV_VARS[secret_file] = Path(
|
||||
os.path.join("/run/secrets", secret_file)
|
||||
).read_text()
|
||||
|
||||
config_file = os.environ.get("CONFIG_FILE", "/config/config.yml")
|
||||
|
||||
# Check if we can use .yaml instead of .yml
|
||||
@@ -23,13 +32,16 @@ config_file_yaml = config_file.replace(".yml", ".yaml")
|
||||
if os.path.isfile(config_file_yaml):
|
||||
config_file = config_file_yaml
|
||||
|
||||
with open(config_file) as f:
|
||||
raw_config = f.read()
|
||||
try:
|
||||
with open(config_file) as f:
|
||||
raw_config = f.read()
|
||||
|
||||
if config_file.endswith((".yaml", ".yml")):
|
||||
config: dict[str, any] = yaml.safe_load(raw_config)
|
||||
elif config_file.endswith(".json"):
|
||||
config: dict[str, any] = json.loads(raw_config)
|
||||
if config_file.endswith((".yaml", ".yml")):
|
||||
config: dict[str, any] = yaml.safe_load(raw_config)
|
||||
elif config_file.endswith(".json"):
|
||||
config: dict[str, any] = json.loads(raw_config)
|
||||
except FileNotFoundError:
|
||||
config: dict[str, any] = {}
|
||||
|
||||
go2rtc_config: dict[str, any] = config.get("go2rtc", {})
|
||||
|
||||
@@ -49,7 +61,15 @@ if go2rtc_config.get("log") is None:
|
||||
elif go2rtc_config["log"].get("format") is None:
|
||||
go2rtc_config["log"]["format"] = "text"
|
||||
|
||||
if not go2rtc_config.get("webrtc", {}).get("candidates", []):
|
||||
# ensure there is a default webrtc config
|
||||
if not go2rtc_config.get("webrtc"):
|
||||
go2rtc_config["webrtc"] = {}
|
||||
|
||||
# go2rtc should listen on 8555 tcp & udp by default
|
||||
if not go2rtc_config["webrtc"].get("listen"):
|
||||
go2rtc_config["webrtc"]["listen"] = ":8555"
|
||||
|
||||
if not go2rtc_config["webrtc"].get("candidates", []):
|
||||
default_candidates = []
|
||||
# use internal candidate if it was discovered when running through the add-on
|
||||
internal_candidate = os.environ.get(
|
||||
@@ -92,9 +112,9 @@ if int(os.environ["LIBAVFORMAT_VERSION_MAJOR"]) < 59:
|
||||
"rtsp": "-fflags nobuffer -flags low_delay -stimeout 5000000 -user_agent go2rtc/ffmpeg -rtsp_transport tcp -i {input}"
|
||||
}
|
||||
elif go2rtc_config["ffmpeg"].get("rtsp") is None:
|
||||
go2rtc_config["ffmpeg"][
|
||||
"rtsp"
|
||||
] = "-fflags nobuffer -flags low_delay -stimeout 5000000 -user_agent go2rtc/ffmpeg -rtsp_transport tcp -i {input}"
|
||||
go2rtc_config["ffmpeg"]["rtsp"] = (
|
||||
"-fflags nobuffer -flags low_delay -stimeout 5000000 -user_agent go2rtc/ffmpeg -rtsp_transport tcp -i {input}"
|
||||
)
|
||||
|
||||
for name in go2rtc_config.get("streams", {}):
|
||||
stream = go2rtc_config["streams"][name]
|
||||
|
||||
43
docker/main/rootfs/usr/local/nginx/conf/auth_location.conf
Normal file
43
docker/main/rootfs/usr/local/nginx/conf/auth_location.conf
Normal file
@@ -0,0 +1,43 @@
|
||||
set $upstream_auth http://127.0.0.1:5001/auth;
|
||||
|
||||
## Virtual endpoint created by nginx to forward auth requests.
|
||||
location /auth {
|
||||
## Essential Proxy Configuration
|
||||
internal;
|
||||
proxy_pass $upstream_auth;
|
||||
|
||||
## Headers
|
||||
|
||||
# First strip out all the request headers
|
||||
# Note: This is important to ensure that upgrade requests for secure
|
||||
# websockets dont cause the backend to fail
|
||||
proxy_pass_request_headers off;
|
||||
# Pass info about the request
|
||||
proxy_set_header X-Original-Method $request_method;
|
||||
proxy_set_header X-Original-URL $scheme://$http_host$request_uri;
|
||||
proxy_set_header X-Server-Port $server_port;
|
||||
proxy_set_header Content-Length "";
|
||||
# Pass along auth related info
|
||||
proxy_set_header Authorization $http_authorization;
|
||||
proxy_set_header Cookie $http_cookie;
|
||||
proxy_set_header X-CSRF-TOKEN "1";
|
||||
|
||||
# include headers from common auth proxies
|
||||
include proxy_trusted_headers.conf;
|
||||
|
||||
## Basic Proxy Configuration
|
||||
proxy_pass_request_body off;
|
||||
proxy_next_upstream error timeout invalid_header http_500 http_502 http_503; # Timeout if the real server is dead
|
||||
proxy_redirect http:// $scheme://;
|
||||
proxy_http_version 1.1;
|
||||
proxy_cache_bypass $cookie_session;
|
||||
proxy_no_cache $cookie_session;
|
||||
proxy_buffers 4 32k;
|
||||
client_body_buffer_size 128k;
|
||||
|
||||
## Advanced Proxy Configuration
|
||||
send_timeout 5m;
|
||||
proxy_read_timeout 240;
|
||||
proxy_send_timeout 240;
|
||||
proxy_connect_timeout 240;
|
||||
}
|
||||
22
docker/main/rootfs/usr/local/nginx/conf/auth_request.conf
Normal file
22
docker/main/rootfs/usr/local/nginx/conf/auth_request.conf
Normal file
@@ -0,0 +1,22 @@
|
||||
## Send a subrequest to verify if the user is authenticated and has permission to access the resource.
|
||||
auth_request /auth;
|
||||
|
||||
## Save the upstream metadata response headers from Authelia to variables.
|
||||
auth_request_set $user $upstream_http_remote_user;
|
||||
auth_request_set $groups $upstream_http_remote_groups;
|
||||
auth_request_set $name $upstream_http_remote_name;
|
||||
auth_request_set $email $upstream_http_remote_email;
|
||||
|
||||
## Inject the metadata response headers from the variables into the request made to the backend.
|
||||
proxy_set_header Remote-User $user;
|
||||
proxy_set_header Remote-Groups $groups;
|
||||
proxy_set_header Remote-Email $email;
|
||||
proxy_set_header Remote-Name $name;
|
||||
|
||||
## Refresh the cookie as needed
|
||||
auth_request_set $auth_cookie $upstream_http_set_cookie;
|
||||
add_header Set-Cookie $auth_cookie;
|
||||
|
||||
## Pass the location header back up if it exists
|
||||
auth_request_set $redirection_url $upstream_http_location;
|
||||
add_header Location $redirection_url;
|
||||
@@ -10,6 +10,8 @@ events {
|
||||
}
|
||||
|
||||
http {
|
||||
map_hash_bucket_size 256;
|
||||
|
||||
include mime.types;
|
||||
default_type application/octet-stream;
|
||||
|
||||
@@ -32,6 +34,13 @@ http {
|
||||
gzip_proxied no-cache no-store private expired auth;
|
||||
gzip_vary on;
|
||||
|
||||
proxy_cache_path /dev/shm/nginx_cache levels=1:2 keys_zone=api_cache:10m max_size=10m inactive=1m use_temp_path=off;
|
||||
|
||||
map $sent_http_content_type $should_not_cache {
|
||||
'application/json' 0;
|
||||
default 1;
|
||||
}
|
||||
|
||||
upstream frigate_api {
|
||||
server 127.0.0.1:5001;
|
||||
keepalive 1024;
|
||||
@@ -53,7 +62,10 @@ http {
|
||||
}
|
||||
|
||||
server {
|
||||
listen 5000;
|
||||
# intended for external traffic, protected by auth
|
||||
listen [::]:8080 ipv6only=off;
|
||||
# intended for internal traffic, not protected by auth
|
||||
listen [::]:5000 ipv6only=off;
|
||||
|
||||
# vod settings
|
||||
vod_base_url '';
|
||||
@@ -86,7 +98,10 @@ http {
|
||||
gzip on;
|
||||
gzip_types application/vnd.apple.mpegurl;
|
||||
|
||||
include auth_location.conf;
|
||||
|
||||
location /vod/ {
|
||||
include auth_request.conf;
|
||||
aio threads;
|
||||
vod hls;
|
||||
|
||||
@@ -98,6 +113,7 @@ http {
|
||||
}
|
||||
|
||||
location /stream/ {
|
||||
include auth_request.conf;
|
||||
add_header Cache-Control "no-store";
|
||||
expires off;
|
||||
|
||||
@@ -112,7 +128,7 @@ http {
|
||||
}
|
||||
|
||||
location /clips/ {
|
||||
|
||||
include auth_request.conf;
|
||||
types {
|
||||
video/mp4 mp4;
|
||||
image/jpeg jpg;
|
||||
@@ -128,6 +144,7 @@ http {
|
||||
}
|
||||
|
||||
location /recordings/ {
|
||||
include auth_request.conf;
|
||||
types {
|
||||
video/mp4 mp4;
|
||||
}
|
||||
@@ -138,6 +155,7 @@ http {
|
||||
}
|
||||
|
||||
location /exports/ {
|
||||
include auth_request.conf;
|
||||
types {
|
||||
video/mp4 mp4;
|
||||
}
|
||||
@@ -148,59 +166,121 @@ http {
|
||||
}
|
||||
|
||||
location /ws {
|
||||
include auth_request.conf;
|
||||
proxy_pass http://mqtt_ws/;
|
||||
include proxy.conf;
|
||||
}
|
||||
|
||||
location /live/jsmpeg/ {
|
||||
include auth_request.conf;
|
||||
proxy_pass http://jsmpeg/;
|
||||
include proxy.conf;
|
||||
}
|
||||
|
||||
location /live/mse/ {
|
||||
proxy_pass http://go2rtc/;
|
||||
# frigate lovelace card uses this path
|
||||
location /live/mse/api/ws {
|
||||
include auth_request.conf;
|
||||
limit_except GET {
|
||||
deny all;
|
||||
}
|
||||
proxy_pass http://go2rtc/api/ws;
|
||||
include proxy.conf;
|
||||
}
|
||||
|
||||
location /live/webrtc/ {
|
||||
proxy_pass http://go2rtc/;
|
||||
location /live/webrtc/api/ws {
|
||||
include auth_request.conf;
|
||||
limit_except GET {
|
||||
deny all;
|
||||
}
|
||||
proxy_pass http://go2rtc/api/ws;
|
||||
include proxy.conf;
|
||||
}
|
||||
|
||||
location ~* /api/go2rtc([/]?.*)$ {
|
||||
proxy_pass http://go2rtc;
|
||||
rewrite ^/api/go2rtc(.*)$ /api$1 break;
|
||||
# pass through go2rtc player
|
||||
location /live/webrtc/webrtc.html {
|
||||
include auth_request.conf;
|
||||
limit_except GET {
|
||||
deny all;
|
||||
}
|
||||
proxy_pass http://go2rtc/webrtc.html;
|
||||
include proxy.conf;
|
||||
}
|
||||
|
||||
location ~* /api/.*\.(jpg|jpeg|png)$ {
|
||||
# frontend uses this to fetch the version
|
||||
location /api/go2rtc/api {
|
||||
include auth_request.conf;
|
||||
limit_except GET {
|
||||
deny all;
|
||||
}
|
||||
proxy_pass http://go2rtc/api;
|
||||
include proxy.conf;
|
||||
}
|
||||
|
||||
# integration uses this to add webrtc candidate
|
||||
location /api/go2rtc/webrtc {
|
||||
include auth_request.conf;
|
||||
limit_except POST {
|
||||
deny all;
|
||||
}
|
||||
proxy_pass http://go2rtc/api/webrtc;
|
||||
include proxy.conf;
|
||||
}
|
||||
|
||||
location ~* /api/.*\.(jpg|jpeg|png|webp|gif)$ {
|
||||
include auth_request.conf;
|
||||
rewrite ^/api/(.*)$ $1 break;
|
||||
proxy_pass http://frigate_api;
|
||||
include proxy.conf;
|
||||
}
|
||||
|
||||
location /api/ {
|
||||
include auth_request.conf;
|
||||
add_header Cache-Control "no-store";
|
||||
expires off;
|
||||
proxy_pass http://frigate_api/;
|
||||
include proxy.conf;
|
||||
|
||||
proxy_cache api_cache;
|
||||
proxy_cache_lock on;
|
||||
proxy_cache_use_stale updating;
|
||||
proxy_cache_valid 200 5s;
|
||||
proxy_cache_bypass $http_x_cache_bypass;
|
||||
proxy_no_cache $should_not_cache;
|
||||
add_header X-Cache-Status $upstream_cache_status;
|
||||
|
||||
location /api/vod/ {
|
||||
include auth_request.conf;
|
||||
proxy_pass http://frigate_api/vod/;
|
||||
include proxy.conf;
|
||||
proxy_cache off;
|
||||
}
|
||||
|
||||
location /api/login {
|
||||
auth_request off;
|
||||
rewrite ^/api(/.*)$ $1 break;
|
||||
proxy_pass http://frigate_api;
|
||||
include proxy.conf;
|
||||
}
|
||||
|
||||
location /api/stats {
|
||||
include auth_request.conf;
|
||||
access_log off;
|
||||
rewrite ^/api/(.*)$ $1 break;
|
||||
rewrite ^/api(/.*)$ $1 break;
|
||||
proxy_pass http://frigate_api;
|
||||
include proxy.conf;
|
||||
}
|
||||
|
||||
location /api/version {
|
||||
include auth_request.conf;
|
||||
access_log off;
|
||||
rewrite ^/api/(.*)$ $1 break;
|
||||
rewrite ^/api(/.*)$ $1 break;
|
||||
proxy_pass http://frigate_api;
|
||||
include proxy.conf;
|
||||
}
|
||||
}
|
||||
|
||||
location / {
|
||||
# do not require auth for static assets
|
||||
add_header Cache-Control "no-store";
|
||||
expires off;
|
||||
|
||||
@@ -222,22 +302,7 @@ http {
|
||||
sub_filter_once off;
|
||||
|
||||
root /opt/frigate/web;
|
||||
try_files $uri $uri/ /index.html;
|
||||
try_files $uri $uri.html $uri/ /index.html;
|
||||
}
|
||||
}
|
||||
}
|
||||
|
||||
rtmp {
|
||||
server {
|
||||
listen 1935;
|
||||
chunk_size 4096;
|
||||
allow publish 127.0.0.1;
|
||||
deny publish all;
|
||||
allow play all;
|
||||
application live {
|
||||
live on;
|
||||
record off;
|
||||
meta copy;
|
||||
}
|
||||
}
|
||||
}
|
||||
@@ -1,4 +1,26 @@
|
||||
proxy_http_version 1.1;
|
||||
## Headers
|
||||
proxy_set_header Host $host;
|
||||
proxy_set_header Upgrade $http_upgrade;
|
||||
proxy_set_header Connection "Upgrade";
|
||||
proxy_set_header Host $host;
|
||||
proxy_set_header X-Original-URL $scheme://$http_host$request_uri;
|
||||
proxy_set_header X-Forwarded-Proto $scheme;
|
||||
proxy_set_header X-Forwarded-Host $http_host;
|
||||
proxy_set_header X-Forwarded-URI $request_uri;
|
||||
proxy_set_header X-Forwarded-Ssl on;
|
||||
proxy_set_header X-Forwarded-For $proxy_add_x_forwarded_for;
|
||||
proxy_set_header X-Real-IP $remote_addr;
|
||||
|
||||
## Basic Proxy Configuration
|
||||
client_body_buffer_size 128k;
|
||||
proxy_next_upstream error timeout invalid_header http_500 http_502 http_503; ## Timeout if the real server is dead.
|
||||
proxy_redirect http:// $scheme://;
|
||||
proxy_http_version 1.1;
|
||||
proxy_cache_bypass $cookie_session;
|
||||
proxy_no_cache $cookie_session;
|
||||
proxy_buffers 64 256k;
|
||||
|
||||
## Advanced Proxy Configuration
|
||||
send_timeout 5m;
|
||||
proxy_read_timeout 360;
|
||||
proxy_send_timeout 360;
|
||||
proxy_connect_timeout 360;
|
||||
@@ -0,0 +1,22 @@
|
||||
# these headers will be copied to the /auth request and are available
|
||||
# to be mapped in the config to Frigate's remote-user header
|
||||
|
||||
# List of headers sent by common authentication proxies:
|
||||
# - Authelia
|
||||
# - Traefik forward auth
|
||||
# - oauth2_proxy
|
||||
# - Authentik
|
||||
|
||||
proxy_set_header Remote-User $http_remote_user;
|
||||
proxy_set_header Remote-Groups $http_remote_groups;
|
||||
proxy_set_header Remote-Email $http_remote_email;
|
||||
proxy_set_header Remote-Name $http_remote_name;
|
||||
proxy_set_header X-Forwarded-User $http_x_forwarded_user;
|
||||
proxy_set_header X-Forwarded-Groups $http_x_forwarded_groups;
|
||||
proxy_set_header X-Forwarded-Email $http_x_forwarded_email;
|
||||
proxy_set_header X-Forwarded-Preferred-Username $http_x_forwarded_preferred_username;
|
||||
proxy_set_header X-authentik-username $http_x_authentik_username;
|
||||
proxy_set_header X-authentik-groups $http_x_authentik_groups;
|
||||
proxy_set_header X-authentik-email $http_x_authentik_email;
|
||||
proxy_set_header X-authentik-name $http_x_authentik_name;
|
||||
proxy_set_header X-authentik-uid $http_x_authentik_uid;
|
||||
26
docker/rockchip/Dockerfile
Normal file
26
docker/rockchip/Dockerfile
Normal file
@@ -0,0 +1,26 @@
|
||||
# syntax=docker/dockerfile:1.6
|
||||
|
||||
# https://askubuntu.com/questions/972516/debian-frontend-environment-variable
|
||||
ARG DEBIAN_FRONTEND=noninteractive
|
||||
|
||||
FROM wheels as rk-wheels
|
||||
COPY docker/main/requirements-wheels.txt /requirements-wheels.txt
|
||||
COPY docker/rockchip/requirements-wheels-rk.txt /requirements-wheels-rk.txt
|
||||
RUN sed -i "/https:\/\//d" /requirements-wheels.txt
|
||||
RUN pip3 wheel --wheel-dir=/rk-wheels -c /requirements-wheels.txt -r /requirements-wheels-rk.txt
|
||||
|
||||
FROM deps AS rk-frigate
|
||||
ARG TARGETARCH
|
||||
|
||||
RUN --mount=type=bind,from=rk-wheels,source=/rk-wheels,target=/deps/rk-wheels \
|
||||
pip3 install -U /deps/rk-wheels/*.whl
|
||||
|
||||
WORKDIR /opt/frigate/
|
||||
COPY --from=rootfs / /
|
||||
|
||||
ADD https://github.com/MarcA711/rknn-toolkit2/releases/download/v2.0.0/librknnrt.so /usr/lib/
|
||||
|
||||
RUN rm -rf /usr/lib/btbn-ffmpeg/bin/ffmpeg
|
||||
RUN rm -rf /usr/lib/btbn-ffmpeg/bin/ffprobe
|
||||
ADD --chmod=111 https://github.com/MarcA711/Rockchip-FFmpeg-Builds/releases/download/6.1-3/ffmpeg /usr/lib/btbn-ffmpeg/bin/
|
||||
ADD --chmod=111 https://github.com/MarcA711/Rockchip-FFmpeg-Builds/releases/download/6.1-3/ffprobe /usr/lib/btbn-ffmpeg/bin/
|
||||
1
docker/rockchip/requirements-wheels-rk.txt
Normal file
1
docker/rockchip/requirements-wheels-rk.txt
Normal file
@@ -0,0 +1 @@
|
||||
rknn-toolkit-lite2 @ https://github.com/MarcA711/rknn-toolkit2/releases/download/v2.0.0/rknn_toolkit_lite2-2.0.0b0-cp39-cp39-linux_aarch64.whl
|
||||
27
docker/rockchip/rk.hcl
Normal file
27
docker/rockchip/rk.hcl
Normal file
@@ -0,0 +1,27 @@
|
||||
target wheels {
|
||||
dockerfile = "docker/main/Dockerfile"
|
||||
platforms = ["linux/arm64"]
|
||||
target = "wheels"
|
||||
}
|
||||
|
||||
target deps {
|
||||
dockerfile = "docker/main/Dockerfile"
|
||||
platforms = ["linux/arm64"]
|
||||
target = "deps"
|
||||
}
|
||||
|
||||
target rootfs {
|
||||
dockerfile = "docker/main/Dockerfile"
|
||||
platforms = ["linux/arm64"]
|
||||
target = "rootfs"
|
||||
}
|
||||
|
||||
target rk {
|
||||
dockerfile = "docker/rockchip/Dockerfile"
|
||||
contexts = {
|
||||
wheels = "target:wheels",
|
||||
deps = "target:deps",
|
||||
rootfs = "target:rootfs"
|
||||
}
|
||||
platforms = ["linux/arm64"]
|
||||
}
|
||||
10
docker/rockchip/rk.mk
Normal file
10
docker/rockchip/rk.mk
Normal file
@@ -0,0 +1,10 @@
|
||||
BOARDS += rk
|
||||
|
||||
local-rk: version
|
||||
docker buildx bake --load --file=docker/rockchip/rk.hcl --set rk.tags=frigate:latest-rk rk
|
||||
|
||||
build-rk: version
|
||||
docker buildx bake --file=docker/rockchip/rk.hcl --set rk.tags=$(IMAGE_REPO):${GITHUB_REF_NAME}-$(COMMIT_HASH)-rk rk
|
||||
|
||||
push-rk: build-rk
|
||||
docker buildx bake --push --file=docker/rockchip/rk.hcl --set rk.tags=$(IMAGE_REPO):${GITHUB_REF_NAME}-$(COMMIT_HASH)-rk rk
|
||||
106
docker/rocm/Dockerfile
Normal file
106
docker/rocm/Dockerfile
Normal file
@@ -0,0 +1,106 @@
|
||||
# syntax=docker/dockerfile:1.4
|
||||
|
||||
# https://askubuntu.com/questions/972516/debian-frontend-environment-variable
|
||||
ARG DEBIAN_FRONTEND=noninteractive
|
||||
ARG ROCM=5.7.3
|
||||
ARG AMDGPU=gfx900
|
||||
ARG HSA_OVERRIDE_GFX_VERSION
|
||||
ARG HSA_OVERRIDE
|
||||
|
||||
#######################################################################
|
||||
FROM ubuntu:focal as rocm
|
||||
|
||||
ARG ROCM
|
||||
|
||||
RUN apt-get update && apt-get -y upgrade
|
||||
RUN apt-get -y install gnupg wget
|
||||
|
||||
RUN mkdir --parents --mode=0755 /etc/apt/keyrings
|
||||
|
||||
RUN wget https://repo.radeon.com/rocm/rocm.gpg.key -O - | gpg --dearmor | tee /etc/apt/keyrings/rocm.gpg > /dev/null
|
||||
COPY docker/rocm/rocm.list /etc/apt/sources.list.d/
|
||||
COPY docker/rocm/rocm-pin-600 /etc/apt/preferences.d/
|
||||
|
||||
RUN apt-get update
|
||||
|
||||
RUN apt-get -y install --no-install-recommends migraphx
|
||||
RUN apt-get -y install --no-install-recommends migraphx-dev
|
||||
|
||||
RUN mkdir -p /opt/rocm-dist/opt/rocm-$ROCM/lib
|
||||
RUN cd /opt/rocm-$ROCM/lib && cp -dpr libMIOpen*.so* libamd*.so* libhip*.so* libhsa*.so* libmigraphx*.so* librocm*.so* librocblas*.so* /opt/rocm-dist/opt/rocm-$ROCM/lib/
|
||||
RUN cd /opt/rocm-dist/opt/ && ln -s rocm-$ROCM rocm
|
||||
|
||||
RUN mkdir -p /opt/rocm-dist/etc/ld.so.conf.d/
|
||||
RUN echo /opt/rocm/lib|tee /opt/rocm-dist/etc/ld.so.conf.d/rocm.conf
|
||||
|
||||
#######################################################################
|
||||
FROM --platform=linux/amd64 debian:11 as debian-base
|
||||
|
||||
RUN apt-get update && apt-get -y upgrade
|
||||
RUN apt-get -y install --no-install-recommends libelf1 libdrm2 libdrm-amdgpu1 libnuma1 kmod
|
||||
|
||||
RUN apt-get -y install python3
|
||||
|
||||
#######################################################################
|
||||
# ROCm does not come with migraphx wrappers for python 3.9, so we build it here
|
||||
FROM debian-base as debian-build
|
||||
|
||||
ARG ROCM
|
||||
|
||||
COPY --from=rocm /opt/rocm-$ROCM /opt/rocm-$ROCM
|
||||
RUN ln -s /opt/rocm-$ROCM /opt/rocm
|
||||
|
||||
RUN apt-get -y install g++ cmake
|
||||
RUN apt-get -y install python3-pybind11 python3.9-distutils python3-dev
|
||||
|
||||
WORKDIR /opt/build
|
||||
|
||||
COPY docker/rocm/migraphx .
|
||||
|
||||
RUN mkdir build && cd build && cmake .. && make install
|
||||
|
||||
#######################################################################
|
||||
FROM deps AS deps-prelim
|
||||
|
||||
# need this to install libnuma1
|
||||
RUN apt-get update
|
||||
# no ugprade?!?!
|
||||
RUN apt-get -y install libnuma1
|
||||
|
||||
WORKDIR /opt/frigate/
|
||||
COPY --from=rootfs / /
|
||||
COPY docker/rocm/rootfs/ /
|
||||
|
||||
#######################################################################
|
||||
FROM scratch AS rocm-dist
|
||||
|
||||
ARG ROCM
|
||||
ARG AMDGPU
|
||||
|
||||
COPY --from=rocm /opt/rocm-$ROCM/bin/rocminfo /opt/rocm-$ROCM/bin/migraphx-driver /opt/rocm-$ROCM/bin/
|
||||
COPY --from=rocm /opt/rocm-$ROCM/share/miopen/db/*$AMDGPU* /opt/rocm-$ROCM/share/miopen/db/
|
||||
COPY --from=rocm /opt/rocm-$ROCM/lib/rocblas/library/*$AMDGPU* /opt/rocm-$ROCM/lib/rocblas/library/
|
||||
COPY --from=rocm /opt/rocm-dist/ /
|
||||
COPY --from=debian-build /opt/rocm/lib/migraphx.cpython-39-x86_64-linux-gnu.so /opt/rocm-$ROCM/lib/
|
||||
|
||||
#######################################################################
|
||||
FROM deps-prelim AS rocm-prelim-hsa-override0
|
||||
|
||||
ENV HSA_ENABLE_SDMA=0
|
||||
|
||||
COPY --from=rocm-dist / /
|
||||
|
||||
RUN ldconfig
|
||||
|
||||
#######################################################################
|
||||
FROM rocm-prelim-hsa-override0 as rocm-prelim-hsa-override1
|
||||
|
||||
ARG HSA_OVERRIDE_GFX_VERSION
|
||||
ENV HSA_OVERRIDE_GFX_VERSION=$HSA_OVERRIDE_GFX_VERSION
|
||||
|
||||
#######################################################################
|
||||
FROM rocm-prelim-hsa-override$HSA_OVERRIDE as rocm-deps
|
||||
|
||||
# Request yolov8 download at startup
|
||||
ENV DOWNLOAD_YOLOV8=1
|
||||
|
||||
26
docker/rocm/migraphx/CMakeLists.txt
Normal file
26
docker/rocm/migraphx/CMakeLists.txt
Normal file
@@ -0,0 +1,26 @@
|
||||
|
||||
cmake_minimum_required(VERSION 3.1)
|
||||
|
||||
set(CMAKE_CXX_STANDARD 17)
|
||||
set(CMAKE_CXX_STANDARD_REQUIRED ON)
|
||||
set(CMAKE_CXX_EXTENSIONS OFF)
|
||||
|
||||
if(NOT CMAKE_BUILD_TYPE)
|
||||
set(CMAKE_BUILD_TYPE Release)
|
||||
endif()
|
||||
|
||||
SET(CMAKE_INSTALL_RPATH_USE_LINK_PATH TRUE)
|
||||
|
||||
project(migraphx_py)
|
||||
|
||||
include_directories(/opt/rocm/include)
|
||||
|
||||
find_package(pybind11 REQUIRED)
|
||||
pybind11_add_module(migraphx migraphx_py.cpp)
|
||||
|
||||
target_link_libraries(migraphx PRIVATE /opt/rocm/lib/libmigraphx.so /opt/rocm/lib/libmigraphx_tf.so /opt/rocm/lib/libmigraphx_onnx.so)
|
||||
|
||||
install(TARGETS migraphx
|
||||
COMPONENT python
|
||||
LIBRARY DESTINATION /opt/rocm/lib
|
||||
)
|
||||
582
docker/rocm/migraphx/migraphx_py.cpp
Normal file
582
docker/rocm/migraphx/migraphx_py.cpp
Normal file
@@ -0,0 +1,582 @@
|
||||
/*
|
||||
* The MIT License (MIT)
|
||||
*
|
||||
* Copyright (c) 2015-2022 Advanced Micro Devices, Inc. All rights reserved.
|
||||
*
|
||||
* Permission is hereby granted, free of charge, to any person obtaining a copy
|
||||
* of this software and associated documentation files (the "Software"), to deal
|
||||
* in the Software without restriction, including without limitation the rights
|
||||
* to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
|
||||
* copies of the Software, and to permit persons to whom the Software is
|
||||
* furnished to do so, subject to the following conditions:
|
||||
*
|
||||
* The above copyright notice and this permission notice shall be included in
|
||||
* all copies or substantial portions of the Software.
|
||||
*
|
||||
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
|
||||
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
|
||||
* FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
|
||||
* AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
|
||||
* LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
|
||||
* OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
|
||||
* THE SOFTWARE.
|
||||
*/
|
||||
|
||||
#include <pybind11/pybind11.h>
|
||||
#include <pybind11/stl.h>
|
||||
#include <pybind11/numpy.h>
|
||||
#include <migraphx/program.hpp>
|
||||
#include <migraphx/instruction_ref.hpp>
|
||||
#include <migraphx/operation.hpp>
|
||||
#include <migraphx/quantization.hpp>
|
||||
#include <migraphx/generate.hpp>
|
||||
#include <migraphx/instruction.hpp>
|
||||
#include <migraphx/ref/target.hpp>
|
||||
#include <migraphx/stringutils.hpp>
|
||||
#include <migraphx/tf.hpp>
|
||||
#include <migraphx/onnx.hpp>
|
||||
#include <migraphx/load_save.hpp>
|
||||
#include <migraphx/register_target.hpp>
|
||||
#include <migraphx/json.hpp>
|
||||
#include <migraphx/make_op.hpp>
|
||||
#include <migraphx/op/common.hpp>
|
||||
|
||||
#ifdef HAVE_GPU
|
||||
#include <migraphx/gpu/hip.hpp>
|
||||
#endif
|
||||
|
||||
using half = half_float::half;
|
||||
namespace py = pybind11;
|
||||
|
||||
#ifdef __clang__
|
||||
#define MIGRAPHX_PUSH_UNUSED_WARNING \
|
||||
_Pragma("clang diagnostic push") \
|
||||
_Pragma("clang diagnostic ignored \"-Wused-but-marked-unused\"")
|
||||
#define MIGRAPHX_POP_WARNING _Pragma("clang diagnostic pop")
|
||||
#else
|
||||
#define MIGRAPHX_PUSH_UNUSED_WARNING
|
||||
#define MIGRAPHX_POP_WARNING
|
||||
#endif
|
||||
#define MIGRAPHX_PYBIND11_MODULE(...) \
|
||||
MIGRAPHX_PUSH_UNUSED_WARNING \
|
||||
PYBIND11_MODULE(__VA_ARGS__) \
|
||||
MIGRAPHX_POP_WARNING
|
||||
|
||||
#define MIGRAPHX_PYTHON_GENERATE_SHAPE_ENUM(x, t) .value(#x, migraphx::shape::type_t::x)
|
||||
namespace migraphx {
|
||||
|
||||
migraphx::value to_value(py::kwargs kwargs);
|
||||
migraphx::value to_value(py::list lst);
|
||||
|
||||
template <class T, class F>
|
||||
void visit_py(T x, F f)
|
||||
{
|
||||
if(py::isinstance<py::kwargs>(x))
|
||||
{
|
||||
f(to_value(x.template cast<py::kwargs>()));
|
||||
}
|
||||
else if(py::isinstance<py::list>(x))
|
||||
{
|
||||
f(to_value(x.template cast<py::list>()));
|
||||
}
|
||||
else if(py::isinstance<py::bool_>(x))
|
||||
{
|
||||
f(x.template cast<bool>());
|
||||
}
|
||||
else if(py::isinstance<py::int_>(x) or py::hasattr(x, "__index__"))
|
||||
{
|
||||
f(x.template cast<int>());
|
||||
}
|
||||
else if(py::isinstance<py::float_>(x))
|
||||
{
|
||||
f(x.template cast<float>());
|
||||
}
|
||||
else if(py::isinstance<py::str>(x))
|
||||
{
|
||||
f(x.template cast<std::string>());
|
||||
}
|
||||
else if(py::isinstance<migraphx::shape::dynamic_dimension>(x))
|
||||
{
|
||||
f(migraphx::to_value(x.template cast<migraphx::shape::dynamic_dimension>()));
|
||||
}
|
||||
else
|
||||
{
|
||||
MIGRAPHX_THROW("VISIT_PY: Unsupported data type!");
|
||||
}
|
||||
}
|
||||
|
||||
migraphx::value to_value(py::list lst)
|
||||
{
|
||||
migraphx::value v = migraphx::value::array{};
|
||||
for(auto val : lst)
|
||||
{
|
||||
visit_py(val, [&](auto py_val) { v.push_back(py_val); });
|
||||
}
|
||||
|
||||
return v;
|
||||
}
|
||||
|
||||
migraphx::value to_value(py::kwargs kwargs)
|
||||
{
|
||||
migraphx::value v = migraphx::value::object{};
|
||||
|
||||
for(auto arg : kwargs)
|
||||
{
|
||||
auto&& key = py::str(arg.first);
|
||||
auto&& val = arg.second;
|
||||
visit_py(val, [&](auto py_val) { v[key] = py_val; });
|
||||
}
|
||||
return v;
|
||||
}
|
||||
} // namespace migraphx
|
||||
|
||||
namespace pybind11 {
|
||||
namespace detail {
|
||||
|
||||
template <>
|
||||
struct npy_format_descriptor<half>
|
||||
{
|
||||
static std::string format()
|
||||
{
|
||||
// following: https://docs.python.org/3/library/struct.html#format-characters
|
||||
return "e";
|
||||
}
|
||||
static constexpr auto name() { return _("half"); }
|
||||
};
|
||||
|
||||
} // namespace detail
|
||||
} // namespace pybind11
|
||||
|
||||
template <class F>
|
||||
void visit_type(const migraphx::shape& s, F f)
|
||||
{
|
||||
s.visit_type(f);
|
||||
}
|
||||
|
||||
template <class T, class F>
|
||||
void visit(const migraphx::raw_data<T>& x, F f)
|
||||
{
|
||||
x.visit(f);
|
||||
}
|
||||
|
||||
template <class F>
|
||||
void visit_types(F f)
|
||||
{
|
||||
migraphx::shape::visit_types(f);
|
||||
}
|
||||
|
||||
template <class T>
|
||||
py::buffer_info to_buffer_info(T& x)
|
||||
{
|
||||
migraphx::shape s = x.get_shape();
|
||||
assert(s.type() != migraphx::shape::tuple_type);
|
||||
if(s.dynamic())
|
||||
MIGRAPHX_THROW("MIGRAPHX PYTHON: dynamic shape argument passed to to_buffer_info");
|
||||
auto strides = s.strides();
|
||||
std::transform(
|
||||
strides.begin(), strides.end(), strides.begin(), [&](auto i) { return i * s.type_size(); });
|
||||
py::buffer_info b;
|
||||
visit_type(s, [&](auto as) {
|
||||
// migraphx use int8_t data to store bool type, we need to
|
||||
// explicitly specify the data type as bool for python
|
||||
if(s.type() == migraphx::shape::bool_type)
|
||||
{
|
||||
b = py::buffer_info(x.data(),
|
||||
as.size(),
|
||||
py::format_descriptor<bool>::format(),
|
||||
s.ndim(),
|
||||
s.lens(),
|
||||
strides);
|
||||
}
|
||||
else
|
||||
{
|
||||
b = py::buffer_info(x.data(),
|
||||
as.size(),
|
||||
py::format_descriptor<decltype(as())>::format(),
|
||||
s.ndim(),
|
||||
s.lens(),
|
||||
strides);
|
||||
}
|
||||
});
|
||||
return b;
|
||||
}
|
||||
|
||||
migraphx::shape to_shape(const py::buffer_info& info)
|
||||
{
|
||||
migraphx::shape::type_t t;
|
||||
std::size_t n = 0;
|
||||
visit_types([&](auto as) {
|
||||
if(info.format == py::format_descriptor<decltype(as())>::format() or
|
||||
(info.format == "l" and py::format_descriptor<decltype(as())>::format() == "q") or
|
||||
(info.format == "L" and py::format_descriptor<decltype(as())>::format() == "Q"))
|
||||
{
|
||||
t = as.type_enum();
|
||||
n = sizeof(as());
|
||||
}
|
||||
else if(info.format == "?" and py::format_descriptor<decltype(as())>::format() == "b")
|
||||
{
|
||||
t = migraphx::shape::bool_type;
|
||||
n = sizeof(bool);
|
||||
}
|
||||
});
|
||||
|
||||
if(n == 0)
|
||||
{
|
||||
MIGRAPHX_THROW("MIGRAPHX PYTHON: Unsupported data type " + info.format);
|
||||
}
|
||||
|
||||
auto strides = info.strides;
|
||||
std::transform(strides.begin(), strides.end(), strides.begin(), [&](auto i) -> std::size_t {
|
||||
return n > 0 ? i / n : 0;
|
||||
});
|
||||
|
||||
// scalar support
|
||||
if(info.shape.empty())
|
||||
{
|
||||
return migraphx::shape{t};
|
||||
}
|
||||
else
|
||||
{
|
||||
return migraphx::shape{t, info.shape, strides};
|
||||
}
|
||||
}
|
||||
|
||||
MIGRAPHX_PYBIND11_MODULE(migraphx, m)
|
||||
{
|
||||
py::class_<migraphx::shape> shape_cls(m, "shape");
|
||||
shape_cls
|
||||
.def(py::init([](py::kwargs kwargs) {
|
||||
auto v = migraphx::to_value(kwargs);
|
||||
auto t = migraphx::shape::parse_type(v.get("type", "float"));
|
||||
if(v.contains("dyn_dims"))
|
||||
{
|
||||
auto dyn_dims =
|
||||
migraphx::from_value<std::vector<migraphx::shape::dynamic_dimension>>(
|
||||
v.at("dyn_dims"));
|
||||
return migraphx::shape(t, dyn_dims);
|
||||
}
|
||||
auto lens = v.get<std::size_t>("lens", {1});
|
||||
if(v.contains("strides"))
|
||||
return migraphx::shape(t, lens, v.at("strides").to_vector<std::size_t>());
|
||||
else
|
||||
return migraphx::shape(t, lens);
|
||||
}))
|
||||
.def("type", &migraphx::shape::type)
|
||||
.def("lens", &migraphx::shape::lens)
|
||||
.def("strides", &migraphx::shape::strides)
|
||||
.def("ndim", &migraphx::shape::ndim)
|
||||
.def("elements", &migraphx::shape::elements)
|
||||
.def("bytes", &migraphx::shape::bytes)
|
||||
.def("type_string", &migraphx::shape::type_string)
|
||||
.def("type_size", &migraphx::shape::type_size)
|
||||
.def("dyn_dims", &migraphx::shape::dyn_dims)
|
||||
.def("packed", &migraphx::shape::packed)
|
||||
.def("transposed", &migraphx::shape::transposed)
|
||||
.def("broadcasted", &migraphx::shape::broadcasted)
|
||||
.def("standard", &migraphx::shape::standard)
|
||||
.def("scalar", &migraphx::shape::scalar)
|
||||
.def("dynamic", &migraphx::shape::dynamic)
|
||||
.def("__eq__", std::equal_to<migraphx::shape>{})
|
||||
.def("__ne__", std::not_equal_to<migraphx::shape>{})
|
||||
.def("__repr__", [](const migraphx::shape& s) { return migraphx::to_string(s); });
|
||||
|
||||
py::enum_<migraphx::shape::type_t>(shape_cls, "type_t")
|
||||
MIGRAPHX_SHAPE_VISIT_TYPES(MIGRAPHX_PYTHON_GENERATE_SHAPE_ENUM);
|
||||
|
||||
py::class_<migraphx::shape::dynamic_dimension>(shape_cls, "dynamic_dimension")
|
||||
.def(py::init<>())
|
||||
.def(py::init<std::size_t, std::size_t>())
|
||||
.def(py::init<std::size_t, std::size_t, std::set<std::size_t>>())
|
||||
.def_readwrite("min", &migraphx::shape::dynamic_dimension::min)
|
||||
.def_readwrite("max", &migraphx::shape::dynamic_dimension::max)
|
||||
.def_readwrite("optimals", &migraphx::shape::dynamic_dimension::optimals)
|
||||
.def("is_fixed", &migraphx::shape::dynamic_dimension::is_fixed);
|
||||
|
||||
py::class_<migraphx::argument>(m, "argument", py::buffer_protocol())
|
||||
.def_buffer([](migraphx::argument& x) -> py::buffer_info { return to_buffer_info(x); })
|
||||
.def(py::init([](py::buffer b) {
|
||||
py::buffer_info info = b.request();
|
||||
return migraphx::argument(to_shape(info), info.ptr);
|
||||
}))
|
||||
.def("get_shape", &migraphx::argument::get_shape)
|
||||
.def("data_ptr",
|
||||
[](migraphx::argument& x) { return reinterpret_cast<std::uintptr_t>(x.data()); })
|
||||
.def("tolist",
|
||||
[](migraphx::argument& x) {
|
||||
py::list l{x.get_shape().elements()};
|
||||
visit(x, [&](auto data) { l = py::cast(data.to_vector()); });
|
||||
return l;
|
||||
})
|
||||
.def("__eq__", std::equal_to<migraphx::argument>{})
|
||||
.def("__ne__", std::not_equal_to<migraphx::argument>{})
|
||||
.def("__repr__", [](const migraphx::argument& x) { return migraphx::to_string(x); });
|
||||
|
||||
py::class_<migraphx::target>(m, "target");
|
||||
|
||||
py::class_<migraphx::instruction_ref>(m, "instruction_ref")
|
||||
.def("shape", [](migraphx::instruction_ref i) { return i->get_shape(); })
|
||||
.def("op", [](migraphx::instruction_ref i) { return i->get_operator(); });
|
||||
|
||||
py::class_<migraphx::module, std::unique_ptr<migraphx::module, py::nodelete>>(m, "module")
|
||||
.def("print", [](const migraphx::module& mm) { std::cout << mm << std::endl; })
|
||||
.def(
|
||||
"add_instruction",
|
||||
[](migraphx::module& mm,
|
||||
const migraphx::operation& op,
|
||||
std::vector<migraphx::instruction_ref>& args,
|
||||
std::vector<migraphx::module*>& mod_args) {
|
||||
return mm.add_instruction(op, args, mod_args);
|
||||
},
|
||||
py::arg("op"),
|
||||
py::arg("args"),
|
||||
py::arg("mod_args") = std::vector<migraphx::module*>{})
|
||||
.def(
|
||||
"add_literal",
|
||||
[](migraphx::module& mm, py::buffer data) {
|
||||
py::buffer_info info = data.request();
|
||||
auto literal_shape = to_shape(info);
|
||||
return mm.add_literal(literal_shape, reinterpret_cast<char*>(info.ptr));
|
||||
},
|
||||
py::arg("data"))
|
||||
.def(
|
||||
"add_parameter",
|
||||
[](migraphx::module& mm, const std::string& name, const migraphx::shape shape) {
|
||||
return mm.add_parameter(name, shape);
|
||||
},
|
||||
py::arg("name"),
|
||||
py::arg("shape"))
|
||||
.def(
|
||||
"add_return",
|
||||
[](migraphx::module& mm, std::vector<migraphx::instruction_ref>& args) {
|
||||
return mm.add_return(args);
|
||||
},
|
||||
py::arg("args"))
|
||||
.def("__repr__", [](const migraphx::module& mm) { return migraphx::to_string(mm); });
|
||||
|
||||
py::class_<migraphx::program>(m, "program")
|
||||
.def(py::init([]() { return migraphx::program(); }))
|
||||
.def("get_parameter_names", &migraphx::program::get_parameter_names)
|
||||
.def("get_parameter_shapes", &migraphx::program::get_parameter_shapes)
|
||||
.def("get_output_shapes", &migraphx::program::get_output_shapes)
|
||||
.def("is_compiled", &migraphx::program::is_compiled)
|
||||
.def(
|
||||
"compile",
|
||||
[](migraphx::program& p,
|
||||
const migraphx::target& t,
|
||||
bool offload_copy,
|
||||
bool fast_math,
|
||||
bool exhaustive_tune) {
|
||||
migraphx::compile_options options;
|
||||
options.offload_copy = offload_copy;
|
||||
options.fast_math = fast_math;
|
||||
options.exhaustive_tune = exhaustive_tune;
|
||||
p.compile(t, options);
|
||||
},
|
||||
py::arg("t"),
|
||||
py::arg("offload_copy") = true,
|
||||
py::arg("fast_math") = true,
|
||||
py::arg("exhaustive_tune") = false)
|
||||
.def("get_main_module", [](const migraphx::program& p) { return p.get_main_module(); })
|
||||
.def(
|
||||
"create_module",
|
||||
[](migraphx::program& p, const std::string& name) { return p.create_module(name); },
|
||||
py::arg("name"))
|
||||
.def("run",
|
||||
[](migraphx::program& p, py::dict params) {
|
||||
migraphx::parameter_map pm;
|
||||
for(auto x : params)
|
||||
{
|
||||
std::string key = x.first.cast<std::string>();
|
||||
py::buffer b = x.second.cast<py::buffer>();
|
||||
py::buffer_info info = b.request();
|
||||
pm[key] = migraphx::argument(to_shape(info), info.ptr);
|
||||
}
|
||||
return p.eval(pm);
|
||||
})
|
||||
.def("run_async",
|
||||
[](migraphx::program& p,
|
||||
py::dict params,
|
||||
std::uintptr_t stream,
|
||||
std::string stream_name) {
|
||||
migraphx::parameter_map pm;
|
||||
for(auto x : params)
|
||||
{
|
||||
std::string key = x.first.cast<std::string>();
|
||||
py::buffer b = x.second.cast<py::buffer>();
|
||||
py::buffer_info info = b.request();
|
||||
pm[key] = migraphx::argument(to_shape(info), info.ptr);
|
||||
}
|
||||
migraphx::execution_environment exec_env{
|
||||
migraphx::any_ptr(reinterpret_cast<void*>(stream), stream_name), true};
|
||||
return p.eval(pm, exec_env);
|
||||
})
|
||||
.def("sort", &migraphx::program::sort)
|
||||
.def("print", [](const migraphx::program& p) { std::cout << p << std::endl; })
|
||||
.def("__eq__", std::equal_to<migraphx::program>{})
|
||||
.def("__ne__", std::not_equal_to<migraphx::program>{})
|
||||
.def("__repr__", [](const migraphx::program& p) { return migraphx::to_string(p); });
|
||||
|
||||
py::class_<migraphx::operation> op(m, "op");
|
||||
op.def(py::init([](const std::string& name, py::kwargs kwargs) {
|
||||
migraphx::value v = migraphx::value::object{};
|
||||
if(kwargs)
|
||||
{
|
||||
v = migraphx::to_value(kwargs);
|
||||
}
|
||||
return migraphx::make_op(name, v);
|
||||
}))
|
||||
.def("name", &migraphx::operation::name);
|
||||
|
||||
py::enum_<migraphx::op::pooling_mode>(op, "pooling_mode")
|
||||
.value("average", migraphx::op::pooling_mode::average)
|
||||
.value("max", migraphx::op::pooling_mode::max)
|
||||
.value("lpnorm", migraphx::op::pooling_mode::lpnorm);
|
||||
|
||||
py::enum_<migraphx::op::rnn_direction>(op, "rnn_direction")
|
||||
.value("forward", migraphx::op::rnn_direction::forward)
|
||||
.value("reverse", migraphx::op::rnn_direction::reverse)
|
||||
.value("bidirectional", migraphx::op::rnn_direction::bidirectional);
|
||||
|
||||
m.def(
|
||||
"argument_from_pointer",
|
||||
[](const migraphx::shape shape, const int64_t address) {
|
||||
return migraphx::argument(shape, reinterpret_cast<void*>(address));
|
||||
},
|
||||
py::arg("shape"),
|
||||
py::arg("address"));
|
||||
|
||||
m.def(
|
||||
"parse_tf",
|
||||
[](const std::string& filename,
|
||||
bool is_nhwc,
|
||||
unsigned int batch_size,
|
||||
std::unordered_map<std::string, std::vector<std::size_t>> map_input_dims,
|
||||
std::vector<std::string> output_names) {
|
||||
return migraphx::parse_tf(
|
||||
filename, migraphx::tf_options{is_nhwc, batch_size, map_input_dims, output_names});
|
||||
},
|
||||
"Parse tf protobuf (default format is nhwc)",
|
||||
py::arg("filename"),
|
||||
py::arg("is_nhwc") = true,
|
||||
py::arg("batch_size") = 1,
|
||||
py::arg("map_input_dims") = std::unordered_map<std::string, std::vector<std::size_t>>(),
|
||||
py::arg("output_names") = std::vector<std::string>());
|
||||
|
||||
m.def(
|
||||
"parse_onnx",
|
||||
[](const std::string& filename,
|
||||
unsigned int default_dim_value,
|
||||
migraphx::shape::dynamic_dimension default_dyn_dim_value,
|
||||
std::unordered_map<std::string, std::vector<std::size_t>> map_input_dims,
|
||||
std::unordered_map<std::string, std::vector<migraphx::shape::dynamic_dimension>>
|
||||
map_dyn_input_dims,
|
||||
bool skip_unknown_operators,
|
||||
bool print_program_on_error,
|
||||
int64_t max_loop_iterations) {
|
||||
migraphx::onnx_options options;
|
||||
options.default_dim_value = default_dim_value;
|
||||
options.default_dyn_dim_value = default_dyn_dim_value;
|
||||
options.map_input_dims = map_input_dims;
|
||||
options.map_dyn_input_dims = map_dyn_input_dims;
|
||||
options.skip_unknown_operators = skip_unknown_operators;
|
||||
options.print_program_on_error = print_program_on_error;
|
||||
options.max_loop_iterations = max_loop_iterations;
|
||||
return migraphx::parse_onnx(filename, options);
|
||||
},
|
||||
"Parse onnx file",
|
||||
py::arg("filename"),
|
||||
py::arg("default_dim_value") = 0,
|
||||
py::arg("default_dyn_dim_value") = migraphx::shape::dynamic_dimension{1, 1},
|
||||
py::arg("map_input_dims") = std::unordered_map<std::string, std::vector<std::size_t>>(),
|
||||
py::arg("map_dyn_input_dims") =
|
||||
std::unordered_map<std::string, std::vector<migraphx::shape::dynamic_dimension>>(),
|
||||
py::arg("skip_unknown_operators") = false,
|
||||
py::arg("print_program_on_error") = false,
|
||||
py::arg("max_loop_iterations") = 10);
|
||||
|
||||
m.def(
|
||||
"parse_onnx_buffer",
|
||||
[](const std::string& onnx_buffer,
|
||||
unsigned int default_dim_value,
|
||||
migraphx::shape::dynamic_dimension default_dyn_dim_value,
|
||||
std::unordered_map<std::string, std::vector<std::size_t>> map_input_dims,
|
||||
std::unordered_map<std::string, std::vector<migraphx::shape::dynamic_dimension>>
|
||||
map_dyn_input_dims,
|
||||
bool skip_unknown_operators,
|
||||
bool print_program_on_error) {
|
||||
migraphx::onnx_options options;
|
||||
options.default_dim_value = default_dim_value;
|
||||
options.default_dyn_dim_value = default_dyn_dim_value;
|
||||
options.map_input_dims = map_input_dims;
|
||||
options.map_dyn_input_dims = map_dyn_input_dims;
|
||||
options.skip_unknown_operators = skip_unknown_operators;
|
||||
options.print_program_on_error = print_program_on_error;
|
||||
return migraphx::parse_onnx_buffer(onnx_buffer, options);
|
||||
},
|
||||
"Parse onnx file",
|
||||
py::arg("filename"),
|
||||
py::arg("default_dim_value") = 0,
|
||||
py::arg("default_dyn_dim_value") = migraphx::shape::dynamic_dimension{1, 1},
|
||||
py::arg("map_input_dims") = std::unordered_map<std::string, std::vector<std::size_t>>(),
|
||||
py::arg("map_dyn_input_dims") =
|
||||
std::unordered_map<std::string, std::vector<migraphx::shape::dynamic_dimension>>(),
|
||||
py::arg("skip_unknown_operators") = false,
|
||||
py::arg("print_program_on_error") = false);
|
||||
|
||||
m.def(
|
||||
"load",
|
||||
[](const std::string& name, const std::string& format) {
|
||||
migraphx::file_options options;
|
||||
options.format = format;
|
||||
return migraphx::load(name, options);
|
||||
},
|
||||
"Load MIGraphX program",
|
||||
py::arg("filename"),
|
||||
py::arg("format") = "msgpack");
|
||||
|
||||
m.def(
|
||||
"save",
|
||||
[](const migraphx::program& p, const std::string& name, const std::string& format) {
|
||||
migraphx::file_options options;
|
||||
options.format = format;
|
||||
return migraphx::save(p, name, options);
|
||||
},
|
||||
"Save MIGraphX program",
|
||||
py::arg("p"),
|
||||
py::arg("filename"),
|
||||
py::arg("format") = "msgpack");
|
||||
|
||||
m.def("get_target", &migraphx::make_target);
|
||||
m.def("create_argument", [](const migraphx::shape& s, const std::vector<double>& values) {
|
||||
if(values.size() != s.elements())
|
||||
MIGRAPHX_THROW("Values and shape elements do not match");
|
||||
migraphx::argument a{s};
|
||||
a.fill(values.begin(), values.end());
|
||||
return a;
|
||||
});
|
||||
m.def("generate_argument", &migraphx::generate_argument, py::arg("s"), py::arg("seed") = 0);
|
||||
m.def("fill_argument", &migraphx::fill_argument, py::arg("s"), py::arg("value"));
|
||||
m.def("quantize_fp16",
|
||||
&migraphx::quantize_fp16,
|
||||
py::arg("prog"),
|
||||
py::arg("ins_names") = std::vector<std::string>{"all"});
|
||||
m.def("quantize_int8",
|
||||
&migraphx::quantize_int8,
|
||||
py::arg("prog"),
|
||||
py::arg("t"),
|
||||
py::arg("calibration") = std::vector<migraphx::parameter_map>{},
|
||||
py::arg("ins_names") = std::vector<std::string>{"dot", "convolution"});
|
||||
|
||||
#ifdef HAVE_GPU
|
||||
m.def("allocate_gpu", &migraphx::gpu::allocate_gpu, py::arg("s"), py::arg("host") = false);
|
||||
m.def("to_gpu", &migraphx::gpu::to_gpu, py::arg("arg"), py::arg("host") = false);
|
||||
m.def("from_gpu", &migraphx::gpu::from_gpu);
|
||||
m.def("gpu_sync", [] { migraphx::gpu::gpu_sync(); });
|
||||
#endif
|
||||
|
||||
#ifdef VERSION_INFO
|
||||
m.attr("__version__") = VERSION_INFO;
|
||||
#else
|
||||
m.attr("__version__") = "dev";
|
||||
#endif
|
||||
}
|
||||
3
docker/rocm/rocm-pin-600
Normal file
3
docker/rocm/rocm-pin-600
Normal file
@@ -0,0 +1,3 @@
|
||||
Package: *
|
||||
Pin: release o=repo.radeon.com
|
||||
Pin-Priority: 600
|
||||
38
docker/rocm/rocm.hcl
Normal file
38
docker/rocm/rocm.hcl
Normal file
@@ -0,0 +1,38 @@
|
||||
variable "AMDGPU" {
|
||||
default = "gfx900"
|
||||
}
|
||||
variable "ROCM" {
|
||||
default = "5.7.3"
|
||||
}
|
||||
variable "HSA_OVERRIDE_GFX_VERSION" {
|
||||
default = ""
|
||||
}
|
||||
variable "HSA_OVERRIDE" {
|
||||
default = "1"
|
||||
}
|
||||
target deps {
|
||||
dockerfile = "docker/main/Dockerfile"
|
||||
platforms = ["linux/amd64"]
|
||||
target = "deps"
|
||||
}
|
||||
|
||||
target rootfs {
|
||||
dockerfile = "docker/main/Dockerfile"
|
||||
platforms = ["linux/amd64"]
|
||||
target = "rootfs"
|
||||
}
|
||||
|
||||
target rocm {
|
||||
dockerfile = "docker/rocm/Dockerfile"
|
||||
contexts = {
|
||||
deps = "target:deps",
|
||||
rootfs = "target:rootfs"
|
||||
}
|
||||
platforms = ["linux/amd64"]
|
||||
args = {
|
||||
AMDGPU = AMDGPU,
|
||||
ROCM = ROCM,
|
||||
HSA_OVERRIDE_GFX_VERSION = HSA_OVERRIDE_GFX_VERSION,
|
||||
HSA_OVERRIDE = HSA_OVERRIDE
|
||||
}
|
||||
}
|
||||
1
docker/rocm/rocm.list
Normal file
1
docker/rocm/rocm.list
Normal file
@@ -0,0 +1 @@
|
||||
deb [arch=amd64 signed-by=/etc/apt/keyrings/rocm.gpg] https://repo.radeon.com/rocm/apt/5.7.3 focal main
|
||||
17
docker/rocm/rocm.mk
Normal file
17
docker/rocm/rocm.mk
Normal file
@@ -0,0 +1,17 @@
|
||||
BOARDS += rocm
|
||||
|
||||
# AMD/ROCm is chunky so we build couple of smaller images for specific chipsets
|
||||
ROCM_CHIPSETS:=gfx900:9.0.0 gfx1030:10.3.0 gfx1100:11.0.0
|
||||
|
||||
local-rocm: version
|
||||
$(foreach chipset,$(ROCM_CHIPSETS),AMDGPU=$(word 1,$(subst :, ,$(chipset))) HSA_OVERRIDE_GFX_VERSION=$(word 2,$(subst :, ,$(chipset))) HSA_OVERRIDE=1 docker buildx bake --load --file=docker/rocm/rocm.hcl --set rocm.tags=frigate:latest-rocm-$(word 1,$(subst :, ,$(chipset))) rocm;)
|
||||
unset HSA_OVERRIDE_GFX_VERSION && HSA_OVERRIDE=0 AMDGPU=gfx docker buildx bake --load --file=docker/rocm/rocm.hcl --set rocm.tags=frigate:latest-rocm rocm
|
||||
|
||||
build-rocm: version
|
||||
$(foreach chipset,$(ROCM_CHIPSETS),AMDGPU=$(word 1,$(subst :, ,$(chipset))) HSA_OVERRIDE_GFX_VERSION=$(word 2,$(subst :, ,$(chipset))) HSA_OVERRIDE=1 docker buildx bake --file=docker/rocm/rocm.hcl --set rocm.tags=$(IMAGE_REPO):${GITHUB_REF_NAME}-$(COMMIT_HASH)-rocm-$(chipset) rocm;)
|
||||
unset HSA_OVERRIDE_GFX_VERSION && HSA_OVERRIDE=0 AMDGPU=gfx docker buildx bake --file=docker/rocm/rocm.hcl --set rocm.tags=$(IMAGE_REPO):${GITHUB_REF_NAME}-$(COMMIT_HASH)-rocm rocm
|
||||
|
||||
push-rocm: build-rocm
|
||||
$(foreach chipset,$(ROCM_CHIPSETS),AMDGPU=$(word 1,$(subst :, ,$(chipset))) HSA_OVERRIDE_GFX_VERSION=$(word 2,$(subst :, ,$(chipset))) HSA_OVERRIDE=1 docker buildx bake --push --file=docker/rocm/rocm.hcl --set rocm.tags=$(IMAGE_REPO):${GITHUB_REF_NAME}-$(COMMIT_HASH)-rocm-$(chipset) rocm;)
|
||||
unset HSA_OVERRIDE_GFX_VERSION && HSA_OVERRIDE=0 AMDGPU=gfx docker buildx bake --push --file=docker/rocm/rocm.hcl --set rocm.tags=$(IMAGE_REPO):${GITHUB_REF_NAME}-$(COMMIT_HASH)-rocm rocm
|
||||
|
||||
20
docker/rocm/rootfs/etc/s6-overlay/s6-rc.d/compile-rocm-models/run
Executable file
20
docker/rocm/rootfs/etc/s6-overlay/s6-rc.d/compile-rocm-models/run
Executable file
@@ -0,0 +1,20 @@
|
||||
#!/command/with-contenv bash
|
||||
# shellcheck shell=bash
|
||||
# Compile YoloV8 ONNX files into ROCm MIGraphX files
|
||||
|
||||
OVERRIDE=$(cd /opt/frigate && python3 -c 'import frigate.detectors.plugins.rocm as rocm; print(rocm.auto_override_gfx_version())')
|
||||
|
||||
if ! test -z "$OVERRIDE"; then
|
||||
echo "Using HSA_OVERRIDE_GFX_VERSION=${OVERRIDE}"
|
||||
export HSA_OVERRIDE_GFX_VERSION=$OVERRIDE
|
||||
fi
|
||||
|
||||
for onnx in /config/model_cache/yolov8/*.onnx
|
||||
do
|
||||
mxr="${onnx%.onnx}.mxr"
|
||||
if ! test -f $mxr; then
|
||||
echo "processing $onnx into $mxr"
|
||||
/opt/rocm/bin/migraphx-driver compile $onnx --optimize --gpu --enable-offload-copy --binary -o $mxr
|
||||
fi
|
||||
done
|
||||
|
||||
@@ -0,0 +1 @@
|
||||
oneshot
|
||||
@@ -0,0 +1 @@
|
||||
/etc/s6-overlay/s6-rc.d/compile-rocm-models/run
|
||||
@@ -8,6 +8,8 @@ ARG TRT_BASE=nvcr.io/nvidia/tensorrt:23.03-py3
|
||||
# Build TensorRT-specific library
|
||||
FROM ${TRT_BASE} AS trt-deps
|
||||
|
||||
ARG COMPUTE_LEVEL
|
||||
|
||||
RUN apt-get update \
|
||||
&& apt-get install -y git build-essential cuda-nvcc-* cuda-nvtx-* libnvinfer-dev libnvinfer-plugin-dev libnvparsers-dev libnvonnxparsers-dev \
|
||||
&& rm -rf /var/lib/apt/lists/*
|
||||
|
||||
@@ -23,8 +23,8 @@ else
|
||||
fi
|
||||
tar xaf jetson_multimedia_api.tbz2 -C / && rm jetson_multimedia_api.tbz2
|
||||
|
||||
wget -q https://github.com/madsciencetist/jetson-ffmpeg/archive/refs/heads/master.zip
|
||||
unzip master.zip && rm master.zip && cd jetson-ffmpeg-master
|
||||
wget -q https://github.com/AndBobsYourUncle/jetson-ffmpeg/archive/9c17b09.zip -O jetson-ffmpeg.zip
|
||||
unzip jetson-ffmpeg.zip && rm jetson-ffmpeg.zip && mv jetson-ffmpeg-* jetson-ffmpeg && cd jetson-ffmpeg
|
||||
LD_LIBRARY_PATH=$(pwd)/stubs:$LD_LIBRARY_PATH # tegra multimedia libs aren't available in image, so use stubs for ffmpeg build
|
||||
mkdir build
|
||||
cd build
|
||||
@@ -42,7 +42,7 @@ cd ../ && rm -rf nv-codec-headers-master
|
||||
# Build ffmpeg with nvmpi patch
|
||||
wget -q https://ffmpeg.org/releases/ffmpeg-6.0.tar.xz
|
||||
tar xaf ffmpeg-*.tar.xz && rm ffmpeg-*.tar.xz && cd ffmpeg-*
|
||||
patch -p1 < ../jetson-ffmpeg-master/ffmpeg_patches/ffmpeg6.0_nvmpi.patch
|
||||
patch -p1 < ../jetson-ffmpeg/ffmpeg_patches/ffmpeg6.0_nvmpi.patch
|
||||
export PKG_CONFIG_PATH=$INSTALL_PREFIX/lib/pkgconfig
|
||||
# enable Jetson codecs but disable dGPU codecs
|
||||
./configure --cc='ccache gcc' --cxx='ccache g++' \
|
||||
|
||||
@@ -11,7 +11,7 @@ git clone --depth 1 https://github.com/NateMeyer/tensorrt_demos.git -b condition
|
||||
if [ ! -e /usr/local/cuda ]; then
|
||||
ln -s /usr/local/cuda-* /usr/local/cuda
|
||||
fi
|
||||
cd ./tensorrt_demos/plugins && make all -j$(nproc)
|
||||
cd ./tensorrt_demos/plugins && make all -j$(nproc) computes="${COMPUTE_LEVEL:-}"
|
||||
cp libyolo_layer.so /usr/local/lib/libyolo_layer.so
|
||||
|
||||
# Store yolo scripts for later conversion
|
||||
|
||||
@@ -10,12 +10,16 @@ variable "SLIM_BASE" {
|
||||
variable "TRT_BASE" {
|
||||
default = null
|
||||
}
|
||||
variable "COMPUTE_LEVEL" {
|
||||
default = ""
|
||||
}
|
||||
|
||||
target "_build_args" {
|
||||
args = {
|
||||
BASE_IMAGE = BASE_IMAGE,
|
||||
SLIM_BASE = SLIM_BASE,
|
||||
TRT_BASE = TRT_BASE
|
||||
TRT_BASE = TRT_BASE,
|
||||
COMPUTE_LEVEL = COMPUTE_LEVEL
|
||||
}
|
||||
platforms = ["linux/${ARCH}"]
|
||||
}
|
||||
|
||||
@@ -2,7 +2,7 @@ BOARDS += trt
|
||||
|
||||
JETPACK4_BASE ?= timongentzsch/l4t-ubuntu20-opencv:latest # L4T 32.7.1 JetPack 4.6.1
|
||||
JETPACK5_BASE ?= nvcr.io/nvidia/l4t-tensorrt:r8.5.2-runtime # L4T 35.3.1 JetPack 5.1.1
|
||||
X86_DGPU_ARGS := ARCH=amd64
|
||||
X86_DGPU_ARGS := ARCH=amd64 COMPUTE_LEVEL="50 60 70 80 90"
|
||||
JETPACK4_ARGS := ARCH=arm64 BASE_IMAGE=$(JETPACK4_BASE) SLIM_BASE=$(JETPACK4_BASE) TRT_BASE=$(JETPACK4_BASE)
|
||||
JETPACK5_ARGS := ARCH=arm64 BASE_IMAGE=$(JETPACK5_BASE) SLIM_BASE=$(JETPACK5_BASE) TRT_BASE=$(JETPACK5_BASE)
|
||||
|
||||
|
||||
@@ -96,7 +96,7 @@ model:
|
||||
|
||||
Note that if you rename objects in the labelmap, you will also need to update your `objects -> track` list as well.
|
||||
|
||||
:::caution
|
||||
:::warning
|
||||
|
||||
Some labels have special handling and modifications can disable functionality.
|
||||
|
||||
@@ -120,7 +120,7 @@ NOTE: The folder that is mapped from the host needs to be the folder that contai
|
||||
|
||||
## Custom go2rtc version
|
||||
|
||||
Frigate currently includes go2rtc v1.8.1, there may be certain cases where you want to run a different version of go2rtc.
|
||||
Frigate currently includes go2rtc v1.9.2, there may be certain cases where you want to run a different version of go2rtc.
|
||||
|
||||
To do this:
|
||||
|
||||
|
||||
98
docs/docs/configuration/authentication.md
Normal file
98
docs/docs/configuration/authentication.md
Normal file
@@ -0,0 +1,98 @@
|
||||
---
|
||||
id: authentication
|
||||
title: Authentication
|
||||
---
|
||||
|
||||
# Authentication
|
||||
|
||||
## Modes
|
||||
|
||||
Frigate supports two modes for authentication
|
||||
|
||||
| Mode | Description |
|
||||
| -------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
|
||||
| `native` | (default) Use this mode if you don't implement authentication with a proxy in front of Frigate. |
|
||||
| `proxy` | Use this mode if you have an existing proxy for authentication. Supports passing authenticated user downstream to Frigate for role-based authorization (future implementation). |
|
||||
|
||||
### Native mode
|
||||
|
||||
Frigate stores user information in its database. Password hashes are generated using industry standard PBKDF2-SHA256 with 600,000 iterations. Upon successful login, a JWT token is issued with an expiration date and set as a cookie. The cookie is refreshed as needed automatically. This JWT token can also be passed in the Authorization header as a bearer token.
|
||||
|
||||
Users are managed in the UI under Settings > Users.
|
||||
|
||||
#### Onboarding
|
||||
|
||||
On startup, an admin user and password are generated and printed in the logs. It is recommended to set a new password for the admin account after logging in for the first time under Settings > Users.
|
||||
|
||||
#### Resetting admin password
|
||||
|
||||
In the event that you are locked out of your instance, you can tell Frigate to reset the admin password and print it in the logs on next startup using the `reset_admin_password` setting in your config file.
|
||||
|
||||
#### Login failure rate limiting
|
||||
|
||||
In order to limit the risk of brute force attacks, rate limiting is available for login failures. This is implemented with Flask-Limiter, and the string notation for valid values is available in [the documentation](https://flask-limiter.readthedocs.io/en/stable/configuration.html#rate-limit-string-notation).
|
||||
|
||||
For example, `1/second;5/minute;20/hour` will rate limit the login endpoint when failures occur more than:
|
||||
|
||||
- 1 time per second
|
||||
- 5 times per minute
|
||||
- 20 times per hour
|
||||
|
||||
Restarting Frigate will reset the rate limits.
|
||||
|
||||
If you are running Frigate behind a proxy, you will want to set `trusted_proxies` or these rate limits will apply to the upstream proxy IP address. This means that a brute force attack will rate limit login attempts from other devices and could temporarily lock you out of your instance. In order to ensure rate limits only apply to the actual IP address where the requests are coming from, you will need to list the upstream networks that you want to trust. These trusted proxies are checked against the `X-Forwarded-For` header when looking for the IP address where the request originated.
|
||||
|
||||
If you are running a reverse proxy in the same docker compose file as Frigate, here is an example of how your auth config might look:
|
||||
|
||||
```yaml
|
||||
auth:
|
||||
mode: native
|
||||
failed_login_rate_limit: "1/second;5/minute;20/hour"
|
||||
trusted_proxies:
|
||||
- 172.18.0.0/16 # <---- this is the subnet for the internal docker compose network
|
||||
```
|
||||
|
||||
### Proxy mode
|
||||
|
||||
Proxy mode is designed to complement common upstream authentication proxies such as Authelia, Authentik, oauth2_proxy, or traefik-forward-auth.
|
||||
|
||||
#### Header mapping
|
||||
|
||||
If your proxy supports passing a header with the authenticated username, you can use the `header_map` config to specify the header name so it is passed to Frigate. For example, the following will map the `X-Forwarded-User` value. Header names are not case sensitive.
|
||||
|
||||
```yaml
|
||||
auth:
|
||||
...
|
||||
header_map:
|
||||
user: x-forwarded-user
|
||||
```
|
||||
|
||||
Note that only the following list of headers are permitted by default:
|
||||
|
||||
```
|
||||
Remote-User
|
||||
Remote-Groups
|
||||
Remote-Email
|
||||
Remote-Name
|
||||
X-Forwarded-User
|
||||
X-Forwarded-Groups
|
||||
X-Forwarded-Email
|
||||
X-Forwarded-Preferred-Username
|
||||
X-authentik-username
|
||||
X-authentik-groups
|
||||
X-authentik-email
|
||||
X-authentik-name
|
||||
X-authentik-uid
|
||||
```
|
||||
|
||||
If you would like to add more options, you can overwrite the default file with a docker bind mount at `/usr/local/nginx/conf/proxy_trusted_headers.conf`. Reference the source code for the default file formatting.
|
||||
|
||||
Future versions of Frigate may leverage group and role headers for authorization in Frigate as well.
|
||||
|
||||
#### Login page redirection
|
||||
|
||||
Frigate gracefully performs login page redirection that should work with most authentication proxies. If your reverse proxy returns a `Location` header on `401`, `302`, or `307` unauthorized responses, Frigate's frontend will automatically detect it and redirect to that URL.
|
||||
|
||||
#### Custom logout url
|
||||
|
||||
If your reverse proxy has a dedicated logout url, you can specify using the `logout_url` config option. This will update the link for the `Logout` link in the UI.
|
||||
@@ -31,7 +31,7 @@ First, set up a PTZ preset in your camera's firmware and give it a name. If you'
|
||||
|
||||
Edit your Frigate configuration file and enter the ONVIF parameters for your camera. Specify the object types to track, a required zone the object must enter to begin autotracking, and the camera preset name you configured in your camera's firmware to return to when tracking has ended. Optionally, specify a delay in seconds before Frigate returns the camera to the preset.
|
||||
|
||||
An [ONVIF connection](cameras.md) is required for autotracking to function.
|
||||
An [ONVIF connection](cameras.md) is required for autotracking to function. Also, a [motion mask](masks.md) over your camera's timestamp and any overlay text is recommended to ensure they are completely excluded from scene change calculations when the camera is moving.
|
||||
|
||||
Note that `autotracking` is disabled by default but can be enabled in the configuration or by MQTT.
|
||||
|
||||
@@ -113,7 +113,7 @@ If you initially calibrate with zooming disabled and then enable zooming at a la
|
||||
|
||||
Every PTZ camera is different, so autotracking may not perform ideally in every situation. This experimental feature was initially developed using an EmpireTech/Dahua SD1A404XB-GNR.
|
||||
|
||||
The object tracker in Frigate estimates the motion of the PTZ so that tracked objects are preserved when the camera moves. In most cases (especially for faster moving objects), the default 5 fps is insufficient for the motion estimator to perform accurately. 10 fps is the current recommendation. Higher frame rates will likely not be more performant and will only slow down Frigate and the motion estimator. Adjust your camera to output at least 10 frames per second and change the `fps` parameter in the [detect configuration](index.md) of your configuration file.
|
||||
The object tracker in Frigate estimates the motion of the PTZ so that tracked objects are preserved when the camera moves. In most cases 5 fps is sufficient, but if you plan to track faster moving objects, you may want to increase this slightly. Higher frame rates (> 10fps) will only slow down Frigate and the motion estimator and may lead to dropped frames, especially if you are using experimental zooming.
|
||||
|
||||
A fast [detector](object_detectors.md) is recommended. CPU detectors will not perform well or won't work at all. You can watch Frigate's debug viewer for your camera to see a thicker colored box around the object currently being autotracked.
|
||||
|
||||
@@ -159,7 +159,7 @@ This is often caused by the same reason as above - the `MoveStatus` ONVIF parame
|
||||
|
||||
### I'm seeing this error in the logs: "Autotracker: motion estimator couldn't get transformations". What does this mean?
|
||||
|
||||
To maintain object tracking during PTZ moves, Frigate tracks the motion of your camera based on the details of the frame. If you are seeing this message, it could mean that your `zoom_factor` may be set too high, the scene around your detected object does not have enough details (like hard edges or color variatons), or your camera's shutter speed is too slow and motion blur is occurring. Try reducing `zoom_factor`, finding a way to alter the scene around your object, or changing your camera's shutter speed.
|
||||
To maintain object tracking during PTZ moves, Frigate tracks the motion of your camera based on the details of the frame. If you are seeing this message, it could mean that your `zoom_factor` may be set too high, the scene around your detected object does not have enough details (like hard edges or color variations), or your camera's shutter speed is too slow and motion blur is occurring. Try reducing `zoom_factor`, finding a way to alter the scene around your object, or changing your camera's shutter speed.
|
||||
|
||||
### Calibration seems to have completed, but the camera is not actually moving to track my object. Why?
|
||||
|
||||
|
||||
@@ -1,13 +1,20 @@
|
||||
# Birdseye
|
||||
|
||||
Birdseye allows a heads-up view of your cameras to see what is going on around your property / space without having to watch all cameras that may have nothing happening. Birdseye allows specific modes that intelligently show and disappear based on what you care about.
|
||||
In addition to Frigate's Live camera dashboard, Birdseye allows a portable heads-up view of your cameras to see what is going on around your property / space without having to watch all cameras that may have nothing happening. Birdseye allows specific modes that intelligently show and disappear based on what you care about.
|
||||
|
||||
Birdseye can be viewed by adding the "Birdseye" camera to a Camera Group in the Web UI. Add a Camera Group by pressing the "+" icon on the Live page, and choose "Birdseye" as one of the cameras.
|
||||
|
||||
Birdseye can also be used in HomeAssistant dashboards, cast to media devices, etc.
|
||||
|
||||
## Birdseye Behavior
|
||||
|
||||
### Birdseye Modes
|
||||
|
||||
Birdseye offers different modes to customize which cameras show under which circumstances.
|
||||
- **continuous:** All cameras are always included
|
||||
- **motion:** Cameras that have detected motion within the last 30 seconds are included
|
||||
- **objects:** Cameras that have tracked an active object within the last 30 seconds are included
|
||||
|
||||
- **continuous:** All cameras are always included
|
||||
- **motion:** Cameras that have detected motion within the last 30 seconds are included
|
||||
- **objects:** Cameras that have tracked an active object within the last 30 seconds are included
|
||||
|
||||
### Custom Birdseye Icon
|
||||
|
||||
@@ -34,6 +41,29 @@ cameras:
|
||||
enabled: False
|
||||
```
|
||||
|
||||
### Birdseye Inactivity
|
||||
|
||||
By default birdseye shows all cameras that have had the configured activity in the last 30 seconds, this can be configured:
|
||||
|
||||
```yaml
|
||||
birdseye:
|
||||
enabled: True
|
||||
inactivity_threshold: 15
|
||||
```
|
||||
|
||||
## Birdseye Layout
|
||||
|
||||
### Birdseye Dimensions
|
||||
|
||||
The resolution and aspect ratio of birdseye can be configured. Resolution will increase the quality but does not affect the layout. Changing the aspect ratio of birdseye does affect how cameras are laid out.
|
||||
|
||||
```yaml
|
||||
birdseye:
|
||||
enabled: True
|
||||
width: 1280
|
||||
height: 720
|
||||
```
|
||||
|
||||
### Sorting cameras in the Birdseye view
|
||||
|
||||
It is possible to override the order of cameras that are being shown in the Birdseye view.
|
||||
@@ -54,4 +84,28 @@ cameras:
|
||||
order: 2
|
||||
```
|
||||
|
||||
*Note*: Cameras are sorted by default using their name to ensure a constant view inside Birdseye.
|
||||
_Note_: Cameras are sorted by default using their name to ensure a constant view inside Birdseye.
|
||||
|
||||
### Birdseye Cameras
|
||||
|
||||
It is possible to limit the number of cameras shown on birdseye at one time. When this is enabled, birdseye will show the cameras with most recent activity. There is a cooldown to ensure that cameras do not switch too frequently.
|
||||
|
||||
For example, this can be configured to only show the most recently active camera.
|
||||
|
||||
```yaml
|
||||
birdseye:
|
||||
enabled: True
|
||||
layout:
|
||||
max_cameras: 1
|
||||
```
|
||||
|
||||
### Birdseye Scaling
|
||||
|
||||
By default birdseye tries to fit 2 cameras in each row and then double in size until a suitable layout is found. The scaling can be configured with a value between 1.0 and 5.0 depending on use case.
|
||||
|
||||
```yaml
|
||||
birdseye:
|
||||
enabled: True
|
||||
layout:
|
||||
scaling_factor: 3.0
|
||||
```
|
||||
|
||||
@@ -69,16 +69,12 @@ cameras:
|
||||
ffmpeg:
|
||||
output_args:
|
||||
record: -f segment -segment_time 10 -segment_format mp4 -reset_timestamps 1 -strftime 1 -c:v copy -tag:v hvc1 -bsf:v hevc_mp4toannexb -c:a aac
|
||||
rtmp: -c:v copy -c:a aac -f flv
|
||||
|
||||
inputs:
|
||||
- path: rtsp://user:password@camera-ip:554/H264/ch1/main/av_stream # <----- Update for your camera
|
||||
roles:
|
||||
- detect
|
||||
- record
|
||||
- rtmp
|
||||
rtmp:
|
||||
enabled: False # <-- RTMP should be disabled if your stream is not H264
|
||||
detect:
|
||||
width: # <- optional, by default Frigate tries to automatically detect resolution
|
||||
height: # <- optional, by default Frigate tries to automatically detect resolution
|
||||
@@ -105,6 +101,15 @@ If available, recommended settings are:
|
||||
|
||||
According to [this discussion](https://github.com/blakeblackshear/frigate/issues/3235#issuecomment-1135876973), the http video streams seem to be the most reliable for Reolink.
|
||||
|
||||
Cameras connected via a Reolink NVR can be connected with the http stream, use `channel[0..15]` in the stream url for the additional channels.
|
||||
The setup of main stream can be also done via RTSP, but isn't always reliable on all hardware versions. The example configuration is working with the oldest HW version RLN16-410 device with multiple types of cameras.
|
||||
|
||||
:::warning
|
||||
|
||||
The below configuration only works for reolink cameras with stream resolution of 5MP or lower, 8MP+ cameras need to use RTSP as http-flv is not supported in this case.
|
||||
|
||||
:::
|
||||
|
||||
```yaml
|
||||
go2rtc:
|
||||
streams:
|
||||
@@ -112,6 +117,11 @@ go2rtc:
|
||||
- "ffmpeg:http://reolink_ip/flv?port=1935&app=bcs&stream=channel0_main.bcs&user=username&password=password#video=copy#audio=copy#audio=opus"
|
||||
your_reolink_camera_sub:
|
||||
- "ffmpeg:http://reolink_ip/flv?port=1935&app=bcs&stream=channel0_ext.bcs&user=username&password=password"
|
||||
your_reolink_camera_via_nvr:
|
||||
- "ffmpeg:http://reolink_nvr_ip/flv?port=1935&app=bcs&stream=channel3_main.bcs&user=username&password=password" # channel numbers are 0-15
|
||||
- "ffmpeg:your_reolink_camera_via_nvr#audio=aac"
|
||||
your_reolink_camera_via_nvr_sub:
|
||||
- "ffmpeg:http://reolink_nvr_ip/flv?port=1935&app=bcs&stream=channel3_ext.bcs&user=username&password=password"
|
||||
|
||||
cameras:
|
||||
your_reolink_camera:
|
||||
@@ -125,6 +135,31 @@ cameras:
|
||||
input_args: preset-rtsp-restream
|
||||
roles:
|
||||
- detect
|
||||
reolink_via_nvr:
|
||||
ffmpeg:
|
||||
inputs:
|
||||
- path: rtsp://127.0.0.1:8554/your_reolink_camera_via_nvr?video=copy&audio=aac
|
||||
input_args: preset-rtsp-restream
|
||||
roles:
|
||||
- record
|
||||
- path: rtsp://127.0.0.1:8554/your_reolink_camera_via_nvr_sub?video=copy
|
||||
input_args: preset-rtsp-restream
|
||||
roles:
|
||||
- detect
|
||||
```
|
||||
|
||||
#### Reolink Doorbell
|
||||
|
||||
The reolink doorbell supports 2-way audio via go2rtc and other applications. It is important that the http-flv stream is still used for stability, a secondary rtsp stream can be added that will be using for the two way audio only.
|
||||
|
||||
```yaml
|
||||
go2rtc:
|
||||
streams:
|
||||
your_reolink_doorbell:
|
||||
- "ffmpeg:http://reolink_ip/flv?port=1935&app=bcs&stream=channel0_main.bcs&user=username&password=password#video=copy#audio=copy#audio=opus"
|
||||
- rtsp://reolink_ip/Preview_01_sub
|
||||
your_reolink_doorbell_sub:
|
||||
- "ffmpeg:http://reolink_ip/flv?port=1935&app=bcs&stream=channel0_ext.bcs&user=username&password=password"
|
||||
```
|
||||
|
||||
### Unifi Protect Cameras
|
||||
@@ -140,15 +175,14 @@ go2rtc:
|
||||
- rtspx://192.168.1.1:7441/abcdefghijk
|
||||
```
|
||||
|
||||
[See the go2rtc docs for more information](https://github.com/AlexxIT/go2rtc/tree/v1.8.1#source-rtsp)
|
||||
[See the go2rtc docs for more information](https://github.com/AlexxIT/go2rtc/tree/v1.9.2#source-rtsp)
|
||||
|
||||
In the Unifi 2.0 update Unifi Protect Cameras had a change in audio sample rate which causes issues for ffmpeg. The input rate needs to be set for record and rtmp if used directly with unifi protect.
|
||||
In the Unifi 2.0 update Unifi Protect Cameras had a change in audio sample rate which causes issues for ffmpeg. The input rate needs to be set for record if used directly with unifi protect.
|
||||
|
||||
```yaml
|
||||
ffmpeg:
|
||||
output_args:
|
||||
record: preset-record-ubiquiti
|
||||
rtmp: preset-rtmp-ubiquiti # recommend using go2rtc instead
|
||||
```
|
||||
|
||||
### TP-Link VIGI Cameras
|
||||
|
||||
@@ -11,12 +11,11 @@ A camera is enabled by default but can be temporarily disabled by using `enabled
|
||||
|
||||
Each role can only be assigned to one input per camera. The options for roles are as follows:
|
||||
|
||||
| Role | Description |
|
||||
| -------- | ---------------------------------------------------------------------------------------- |
|
||||
| `detect` | Main feed for object detection. [docs](object_detectors.md) |
|
||||
| `record` | Saves segments of the video feed based on configuration settings. [docs](record.md) |
|
||||
| `audio` | Feed for audio based detection. [docs](audio_detectors.md) |
|
||||
| `rtmp` | Deprecated: Broadcast as an RTMP feed for other services to consume. [docs](restream.md) |
|
||||
| Role | Description |
|
||||
| -------- | ----------------------------------------------------------------------------------- |
|
||||
| `detect` | Main feed for object detection. [docs](object_detectors.md) |
|
||||
| `record` | Saves segments of the video feed based on configuration settings. [docs](record.md) |
|
||||
| `audio` | Feed for audio based detection. [docs](audio_detectors.md) |
|
||||
|
||||
```yaml
|
||||
mqtt:
|
||||
@@ -29,7 +28,6 @@ cameras:
|
||||
- path: rtsp://viewer:{FRIGATE_RTSP_PASSWORD}@10.0.10.10:554/cam/realmonitor?channel=1&subtype=2
|
||||
roles:
|
||||
- detect
|
||||
- rtmp # <- deprecated, recommend using restream instead
|
||||
- path: rtsp://viewer:{FRIGATE_RTSP_PASSWORD}@10.0.10.10:554/live
|
||||
roles:
|
||||
- record
|
||||
@@ -52,7 +50,7 @@ For camera model specific settings check the [camera specific](camera_specific.m
|
||||
|
||||
## Setting up camera PTZ controls
|
||||
|
||||
:::caution
|
||||
:::warning
|
||||
|
||||
Not every PTZ supports ONVIF, which is the standard protocol Frigate uses to communicate with your camera. Check the [official list of ONVIF conformant products](https://www.onvif.org/conformant-products/), your camera documentation, or camera manufacturer's website to ensure your PTZ supports ONVIF. Also, ensure your camera is running the latest firmware.
|
||||
|
||||
@@ -81,17 +79,42 @@ This list of working and non-working PTZ cameras is based on user feedback.
|
||||
|
||||
| Brand or specific camera | PTZ Controls | Autotracking | Notes |
|
||||
| ------------------------ | :----------: | :----------: | ----------------------------------------------------------------------------------------------------------------------------------------------- |
|
||||
| Amcrest | ✅ | ✅ | ⛔️ Generally, Amcrest should work, but some older models (like the common IP2M-841) don't support autotracking |
|
||||
| Amcrest | ✅ | ✅ | ⛔️ Generally, Amcrest should work, but some older models (like the common IP2M-841) don't support auto tracking |
|
||||
| Amcrest ASH21 | ❌ | ❌ | No ONVIF support |
|
||||
| Ctronics PTZ | ✅ | ❌ | |
|
||||
| Dahua | ✅ | ✅ | |
|
||||
| Foscam R5 | ✅ | ❌ | |
|
||||
| Hanwha XNP-6550RH | ✅ | ❌ | |
|
||||
| Hikvision | ✅ | ❌ | Incomplete ONVIF support (MoveStatus won't update even on latest firmware) - reported with HWP-N4215IH-DE and DS-2DE3304W-DE, but likely others |
|
||||
| Reolink 511WA | ✅ | ❌ | Zoom only |
|
||||
| Reolink E1 Pro | ✅ | ❌ | |
|
||||
| Reolink E1 Zoom | ✅ | ❌ | |
|
||||
| Reolink RLC-823A 16x | ✅ | ❌ | |
|
||||
| Sunba 405-D20X | ✅ | ❌ | |
|
||||
| Tapo C200 | ✅ | ❌ | Incomplete ONVIF support |
|
||||
| Tapo C210 | ❌ | ❌ | Incomplete ONVIF support |
|
||||
| Tapo C210 | ✅ | ❌ | Incomplete ONVIF support, ONVIF Service Port: 2020 |
|
||||
| Tapo C220 | ✅ | ❌ | Incomplete ONVIF support, ONVIF Service Port: 2020 |
|
||||
| Tapo C225 | ✅ | ❌ | Incomplete ONVIF support, ONVIF Service Port: 2020 |
|
||||
| Tapo C520WS | ✅ | ❌ | Incomplete ONVIF support, ONVIF Service Port: 2020 |
|
||||
| Uniview IPC672LR-AX4DUPK | ✅ | ❌ | Firmware says FOV relative movement is supported, but camera doesn't actually move when sending ONVIF commands |
|
||||
| Vikylin PTZ-2804X-I2 | ❌ | ❌ | Incomplete ONVIF support |
|
||||
|
||||
## Setting up camera groups
|
||||
|
||||
:::tip
|
||||
|
||||
It is recommended to set up camera groups using the UI.
|
||||
|
||||
:::
|
||||
|
||||
Cameras can be grouped together and assigned a name and icon, this allows them to be reviewed and filtered together. There will always be the default group for all cameras.
|
||||
|
||||
```yaml
|
||||
camera_groups:
|
||||
front:
|
||||
cameras:
|
||||
- driveway_cam
|
||||
- garage_cam
|
||||
icon: car
|
||||
order: 0
|
||||
```
|
||||
|
||||
@@ -13,16 +13,16 @@ See [the hwaccel docs](/configuration/hardware_acceleration.md) for more info on
|
||||
|
||||
| Preset | Usage | Other Notes |
|
||||
| --------------------- | ------------------------------ | ----------------------------------------------------- |
|
||||
| preset-rpi-32-h264 | 32 bit Rpi with h264 stream | |
|
||||
| preset-rpi-64-h264 | 64 bit Rpi with h264 stream | |
|
||||
| preset-rpi-64-h265 | 64 bit Rpi with h265 stream | |
|
||||
| preset-vaapi | Intel & AMD VAAPI | Check hwaccel docs to ensure correct driver is chosen |
|
||||
| preset-intel-qsv-h264 | Intel QSV with h264 stream | If issues occur recommend using vaapi preset instead |
|
||||
| preset-intel-qsv-h265 | Intel QSV with h265 stream | If issues occur recommend using vaapi preset instead |
|
||||
| preset-nvidia-h264 | Nvidia GPU with h264 stream | |
|
||||
| preset-nvidia-h265 | Nvidia GPU with h265 stream | |
|
||||
| preset-nvidia-mjpeg | Nvidia GPU with mjpeg stream | Recommend restreaming mjpeg and using nvidia-h264 |
|
||||
| preset-nvidia | Nvidia GPU | |
|
||||
| preset-jetson-h264 | Nvidia Jetson with h264 stream | |
|
||||
| preset-jetson-h265 | Nvidia Jetson with h265 stream | |
|
||||
| preset-rk-h264 | Rockchip MPP with h264 stream | Use image with \*-rk suffix and privileged mode |
|
||||
| preset-rk-h265 | Rockchip MPP with h265 stream | Use image with \*-rk suffix and privileged mode |
|
||||
|
||||
### Input Args Presets
|
||||
|
||||
@@ -42,7 +42,7 @@ See [the camera specific docs](/configuration/camera_specific.md) for more info
|
||||
| preset-rtsp-udp | RTSP Stream via UDP | Use when camera is UDP only |
|
||||
| preset-rtsp-blue-iris | Blue Iris RTSP Stream | Use when consuming a stream from Blue Iris |
|
||||
|
||||
:::caution
|
||||
:::warning
|
||||
|
||||
It is important to be mindful of input args when using restream because you can have a mix of protocols. `http` and `rtmp` presets cannot be used with `rtsp` streams. For example, when using a reolink cam with the rtsp restream as a source for record the preset-http-reolink will cause a crash. In this case presets will need to be set at the stream level. See the example below.
|
||||
|
||||
@@ -71,11 +71,11 @@ cameras:
|
||||
|
||||
Output args presets help make the config more readable and handle use cases for different types of streams to ensure consistent recordings.
|
||||
|
||||
| Preset | Usage | Other Notes |
|
||||
| -------------------------------- | --------------------------------- | --------------------------------------------- |
|
||||
| preset-record-generic | Record WITHOUT audio | This is the default when nothing is specified |
|
||||
| preset-record-generic-audio-aac | Record WITH aac audio | Use this to enable audio in recordings |
|
||||
| preset-record-generic-audio-copy | Record WITH original audio | Use this to enable audio in recordings |
|
||||
| preset-record-mjpeg | Record an mjpeg stream | Recommend restreaming mjpeg stream instead |
|
||||
| preset-record-jpeg | Record live jpeg | Recommend restreaming live jpeg instead |
|
||||
| preset-record-ubiquiti | Record ubiquiti stream with audio | Recordings with ubiquiti non-standard audio |
|
||||
| Preset | Usage | Other Notes |
|
||||
| -------------------------------- | --------------------------------- | ------------------------------------------------------------------------------------------------------------------------------------ |
|
||||
| preset-record-generic | Record WITHOUT audio | This is the default when nothing is specified |
|
||||
| preset-record-generic-audio-copy | Record WITH original audio | Use this to enable audio in recordings |
|
||||
| preset-record-generic-audio-aac | Record WITH transcoded aac audio | Use this to transcode to aac audio. If your source is already aac, use preset-record-generic-audio-copy instead to avoid re-encoding |
|
||||
| preset-record-mjpeg | Record an mjpeg stream | Recommend restreaming mjpeg stream instead |
|
||||
| preset-record-jpeg | Record live jpeg | Recommend restreaming live jpeg instead |
|
||||
| preset-record-ubiquiti | Record ubiquiti stream with audio | Recordings with ubiquiti non-standard audio |
|
||||
|
||||
@@ -3,32 +3,64 @@ id: hardware_acceleration
|
||||
title: Hardware Acceleration
|
||||
---
|
||||
|
||||
It is recommended to update your configuration to enable hardware accelerated decoding in ffmpeg. Depending on your system, these parameters may not be compatible. More information on hardware accelerated decoding for ffmpeg can be found here: https://trac.ffmpeg.org/wiki/HWAccelIntro
|
||||
# Hardware Acceleration
|
||||
|
||||
It is highly recommended to use a GPU for hardware acceleration in Frigate. Some types of hardware acceleration are detected and used automatically, but you may need to update your configuration to enable hardware accelerated decoding in ffmpeg.
|
||||
|
||||
Depending on your system, these parameters may not be compatible. More information on hardware accelerated decoding for ffmpeg can be found here: https://trac.ffmpeg.org/wiki/HWAccelIntro
|
||||
|
||||
# Officially Supported
|
||||
|
||||
## Raspberry Pi 3/4
|
||||
|
||||
Ensure you increase the allocated RAM for your GPU to at least 128 (raspi-config > Performance Options > GPU Memory).
|
||||
**NOTICE**: If you are using the addon, you may need to turn off `Protection mode` for hardware acceleration.
|
||||
Ensure you increase the allocated RAM for your GPU to at least 128 (`raspi-config` > Performance Options > GPU Memory).
|
||||
If you are using the HA addon, you may need to use the full access variant and turn off `Protection mode` for hardware acceleration.
|
||||
|
||||
```yaml
|
||||
# if you want to decode a h264 stream
|
||||
ffmpeg:
|
||||
hwaccel_args: preset-rpi-64-h264
|
||||
|
||||
# if you want to decode a h265 (hevc) stream
|
||||
ffmpeg:
|
||||
hwaccel_args: preset-rpi-64-h265
|
||||
```
|
||||
|
||||
:::note
|
||||
|
||||
If running Frigate in docker, you either need to run in priviliged mode or be sure to map the /dev/video1x devices to Frigate
|
||||
If running Frigate in Docker, you either need to run in privileged mode or
|
||||
map the `/dev/video*` devices to Frigate. With Docker compose add:
|
||||
|
||||
```yaml
|
||||
services:
|
||||
frigate:
|
||||
...
|
||||
devices:
|
||||
- /dev/video11:/dev/video11
|
||||
```
|
||||
|
||||
Or with `docker run`:
|
||||
|
||||
```bash
|
||||
docker run -d \
|
||||
--name frigate \
|
||||
...
|
||||
--device /dev/video10 \
|
||||
--device /dev/video11 \
|
||||
ghcr.io/blakeblackshear/frigate:stable
|
||||
```
|
||||
|
||||
`/dev/video11` is the correct device (on Raspberry Pi 4B). You can check
|
||||
by running the following and looking for `H264`:
|
||||
|
||||
```bash
|
||||
for d in /dev/video*; do
|
||||
echo -e "---\n$d"
|
||||
v4l2-ctl --list-formats-ext -d $d
|
||||
done
|
||||
```
|
||||
|
||||
Or map in all the `/dev/video*` devices.
|
||||
|
||||
:::
|
||||
|
||||
## Intel-based CPUs
|
||||
@@ -42,7 +74,11 @@ ffmpeg:
|
||||
hwaccel_args: preset-vaapi
|
||||
```
|
||||
|
||||
**NOTICE**: With some of the processors, like the J4125, the default driver `iHD` doesn't seem to work correctly for hardware acceleration. You may need to change the driver to `i965` by adding the following environment variable `LIBVA_DRIVER_NAME=i965` to your docker-compose file or [in the `frigate.yaml` for HA OS users](advanced.md#environment_vars).
|
||||
:::note
|
||||
|
||||
With some of the processors, like the J4125, the default driver `iHD` doesn't seem to work correctly for hardware acceleration. You may need to change the driver to `i965` by adding the following environment variable `LIBVA_DRIVER_NAME=i965` to your docker-compose file or [in the `frigate.yaml` for HA OS users](advanced.md#environment_vars).
|
||||
|
||||
:::
|
||||
|
||||
### Via Quicksync (>=10th Generation only)
|
||||
|
||||
@@ -130,7 +166,11 @@ Depending on your OS and kernel configuration, you may need to change the `/proc
|
||||
|
||||
VAAPI supports automatic profile selection so it will work automatically with both H.264 and H.265 streams.
|
||||
|
||||
**Note:** You also need to set `LIBVA_DRIVER_NAME=radeonsi` as an environment variable on the container.
|
||||
:::note
|
||||
|
||||
You need to change the driver to `radeonsi` by adding the following environment variable `LIBVA_DRIVER_NAME=radeonsi` to your docker-compose file or [in the `frigate.yaml` for HA OS users](advanced.md#environment_vars).
|
||||
|
||||
:::
|
||||
|
||||
```yaml
|
||||
ffmpeg:
|
||||
@@ -246,12 +286,12 @@ These instructions were originally based on the [Jellyfin documentation](https:/
|
||||
|
||||
# Community Supported
|
||||
|
||||
## NVIDIA Jetson (Orin AGX, Orin NX, Orin Nano*, Xavier AGX, Xavier NX, TX2, TX1, Nano)
|
||||
## NVIDIA Jetson (Orin AGX, Orin NX, Orin Nano\*, Xavier AGX, Xavier NX, TX2, TX1, Nano)
|
||||
|
||||
A separate set of docker images is available that is based on Jetpack/L4T. They comes with an `ffmpeg` build
|
||||
A separate set of docker images is available that is based on Jetpack/L4T. They come with an `ffmpeg` build
|
||||
with codecs that use the Jetson's dedicated media engine. If your Jetson host is running Jetpack 4.6, use the
|
||||
`frigate-tensorrt-jp4` image, or if your Jetson host is running Jetpack 5.0+, use the `frigate-tensorrt-jp5`
|
||||
image. Note that the Orin Nano has no video encoder, so frigate will use software encoding on this platform,
|
||||
`stable-tensorrt-jp4` tagged image, or if your Jetson host is running Jetpack 5.0+, use the `stable-tensorrt-jp5`
|
||||
tagged image. Note that the Orin Nano has no video encoder, so frigate will use software encoding on this platform,
|
||||
but the image will still allow hardware decoding and tensorrt object detection.
|
||||
|
||||
You will need to use the image with the nvidia container runtime:
|
||||
@@ -262,7 +302,7 @@ You will need to use the image with the nvidia container runtime:
|
||||
docker run -d \
|
||||
...
|
||||
--runtime nvidia
|
||||
ghcr.io/blakeblackshear/frigate-tensorrt-jp5
|
||||
ghcr.io/blakeblackshear/frigate:stable-tensorrt-jp5
|
||||
```
|
||||
|
||||
### Docker Compose - Jetson
|
||||
@@ -272,7 +312,7 @@ version: '2.4'
|
||||
services:
|
||||
frigate:
|
||||
...
|
||||
image: ghcr.io/blakeblackshear/frigate-tensorrt-jp5
|
||||
image: ghcr.io/blakeblackshear/frigate:stable-tensorrt-jp5
|
||||
runtime: nvidia # Add this
|
||||
```
|
||||
|
||||
@@ -319,3 +359,59 @@ ffmpeg:
|
||||
If everything is working correctly, you should see a significant reduction in ffmpeg CPU load and power consumption.
|
||||
Verify that hardware decoding is working by running `jtop` (`sudo pip3 install -U jetson-stats`), which should show
|
||||
that NVDEC/NVDEC1 are in use.
|
||||
|
||||
## Rockchip platform
|
||||
|
||||
Hardware accelerated video de-/encoding is supported on all Rockchip SoCs using [Nyanmisaka's FFmpeg Fork](https://github.com/nyanmisaka/ffmpeg-rockchip) based on [Rockchip's mpp library](https://github.com/rockchip-linux/mpp).
|
||||
|
||||
### Prerequisites
|
||||
|
||||
Make sure that you use a linux distribution that comes with the rockchip BSP kernel 5.10 or 6.1 and rkvdec2 driver. To check, enter the following commands:
|
||||
|
||||
```
|
||||
$ uname -r
|
||||
5.10.xxx-rockchip # or 6.1.xxx; the -rockchip suffix is important
|
||||
$ ls /dev/dri
|
||||
by-path card0 card1 renderD128 renderD129 # should list renderD128
|
||||
```
|
||||
|
||||
I recommend [Joshua Riek's Ubuntu for Rockchip](https://github.com/Joshua-Riek/ubuntu-rockchip), if your board is supported.
|
||||
|
||||
### Setup
|
||||
|
||||
Follow Frigate's default installation instructions, but use a docker image with `-rk` suffix for example `ghcr.io/blakeblackshear/frigate:stable-rk`.
|
||||
|
||||
Next, you need to grant docker permissions to access your hardware:
|
||||
- During the configuration process, you should run docker in privileged mode to avoid any errors due to insufficient permissions. To do so, add `privileged: true` to your `docker-compose.yml` file or the `--privileged` flag to your docker run command.
|
||||
- After everything works, you should only grant necessary permissions to increase security. Add the lines below to your `docker-compose.yml` file or the following options to your docker run command: `--security-opt systempaths=unconfined --security-opt apparmor=unconfined --device /dev/dri:/dev/dri --device /dev/dma_heap:/dev/dma_heap --device /dev/rga:/dev/rga --device /dev/mpp_service:/dev/mpp_service`:
|
||||
|
||||
```yaml
|
||||
security_opt:
|
||||
- apparmor=unconfined
|
||||
- systempaths=unconfined
|
||||
devices:
|
||||
- /dev/dri:/dev/dri
|
||||
- /dev/dma_heap:/dev/dma_heap
|
||||
- /dev/rga:/dev/rga
|
||||
- /dev/mpp_service:/dev/mpp_service
|
||||
```
|
||||
|
||||
### Configuration
|
||||
|
||||
Add one of the following FFmpeg presets to your `config.yaml` to enable hardware video processing:
|
||||
|
||||
```yaml
|
||||
# if you try to decode a h264 encoded stream
|
||||
ffmpeg:
|
||||
hwaccel_args: preset-rk-h264
|
||||
|
||||
# if you try to decode a h265 (hevc) encoded stream
|
||||
ffmpeg:
|
||||
hwaccel_args: preset-rk-h265
|
||||
```
|
||||
|
||||
:::note
|
||||
|
||||
Make sure that your SoC supports hardware acceleration for your input stream. For example, if your camera streams with h265 encoding and a 4k resolution, your SoC must be able to de- and encode h265 with a 4k resolution or higher. If you are unsure whether your SoC meets the requirements, take a look at the datasheet.
|
||||
|
||||
:::
|
||||
|
||||
@@ -1,46 +1,35 @@
|
||||
---
|
||||
id: index
|
||||
title: Frigate Configuration Reference
|
||||
title: Frigate Configuration
|
||||
---
|
||||
|
||||
For Home Assistant Addon installations, the config file needs to be in the root of your Home Assistant config directory (same location as `configuration.yaml`). It can be named `frigate.yaml` or `frigate.yml`, but if both files exist `frigate.yaml` will be preferred and `frigate.yml` will be ignored.
|
||||
|
||||
For all other installation types, the config file should be mapped to `/config/config.yml` inside the container.
|
||||
|
||||
It is recommended to start with a minimal configuration and add to it as described in [this guide](../guides/getting_started.md):
|
||||
It is recommended to start with a minimal configuration and add to it as described in [this guide](../guides/getting_started.md) and use the built in configuration editor in Frigate's UI which supports validation.
|
||||
|
||||
```yaml
|
||||
mqtt:
|
||||
host: mqtt.server.com
|
||||
enabled: False
|
||||
|
||||
cameras:
|
||||
back:
|
||||
dummy_camera: # <--- this will be changed to your actual camera later
|
||||
enabled: False
|
||||
ffmpeg:
|
||||
inputs:
|
||||
- path: rtsp://viewer:{FRIGATE_RTSP_PASSWORD}@10.0.10.10:554/cam/realmonitor?channel=1&subtype=2
|
||||
- path: rtsp://127.0.0.1:554/rtsp
|
||||
roles:
|
||||
- detect
|
||||
```
|
||||
|
||||
### VSCode Configuration Schema
|
||||
## VSCode Configuration Schema
|
||||
|
||||
VSCode (and VSCode addon) supports the JSON schemas which will automatically validate the config. This can be added by adding `# yaml-language-server: $schema=http://frigate_host:5000/api/config/schema.json` to the top of the config file. `frigate_host` being the IP address of Frigate or `ccab4aaf-frigate` if running in the addon.
|
||||
VSCode supports JSON schemas for automatically validating configuration files. You can enable this feature by adding `# yaml-language-server: $schema=http://frigate_host:5000/api/config/schema.json` to the beginning of the configuration file. Replace `frigate_host` with the IP address or hostname of your Frigate server. If you're using both VSCode and Frigate as an add-on, you should use `ccab4aaf-frigate` instead. Make sure to expose the internal unauthenticated port `5000` when accessing the config from VSCode on another machine.
|
||||
|
||||
### Full configuration reference:
|
||||
## Environment Variable Substitution
|
||||
|
||||
:::caution
|
||||
|
||||
It is not recommended to copy this full configuration file. Only specify values that are different from the defaults. Configuration options and default values may change in future versions.
|
||||
|
||||
:::
|
||||
|
||||
**Note:** The following values will be replaced at runtime by using environment variables
|
||||
|
||||
- `{FRIGATE_MQTT_USER}`
|
||||
- `{FRIGATE_MQTT_PASSWORD}`
|
||||
- `{FRIGATE_RTSP_USER}`
|
||||
- `{FRIGATE_RTSP_PASSWORD}`
|
||||
|
||||
for example:
|
||||
Frigate supports the use of environment variables starting with `FRIGATE_` **only** where specifically indicated in the [reference config](./reference.md). For example, the following values can be replaced at runtime by using environment variables:
|
||||
|
||||
```yaml
|
||||
mqtt:
|
||||
@@ -61,617 +50,187 @@ onvif:
|
||||
```
|
||||
|
||||
```yaml
|
||||
mqtt:
|
||||
# Optional: Enable mqtt server (default: shown below)
|
||||
enabled: True
|
||||
# Required: host name
|
||||
host: mqtt.server.com
|
||||
# Optional: port (default: shown below)
|
||||
port: 1883
|
||||
# Optional: topic prefix (default: shown below)
|
||||
# NOTE: must be unique if you are running multiple instances
|
||||
topic_prefix: frigate
|
||||
# Optional: client id (default: shown below)
|
||||
# NOTE: must be unique if you are running multiple instances
|
||||
client_id: frigate
|
||||
# Optional: user
|
||||
# NOTE: MQTT user can be specified with an environment variables that must begin with 'FRIGATE_'.
|
||||
# e.g. user: '{FRIGATE_MQTT_USER}'
|
||||
user: mqtt_user
|
||||
# Optional: password
|
||||
# NOTE: MQTT password can be specified with an environment variables that must begin with 'FRIGATE_'.
|
||||
# e.g. password: '{FRIGATE_MQTT_PASSWORD}'
|
||||
password: password
|
||||
# Optional: tls_ca_certs for enabling TLS using self-signed certs (default: None)
|
||||
tls_ca_certs: /path/to/ca.crt
|
||||
# Optional: tls_client_cert and tls_client key in order to use self-signed client
|
||||
# certificates (default: None)
|
||||
# NOTE: certificate must not be password-protected
|
||||
# do not set user and password when using a client certificate
|
||||
tls_client_cert: /path/to/client.crt
|
||||
tls_client_key: /path/to/client.key
|
||||
# Optional: tls_insecure (true/false) for enabling TLS verification of
|
||||
# the server hostname in the server certificate (default: None)
|
||||
tls_insecure: false
|
||||
# Optional: interval in seconds for publishing stats (default: shown below)
|
||||
stats_interval: 60
|
||||
|
||||
# Optional: Detectors configuration. Defaults to a single CPU detector
|
||||
detectors:
|
||||
# Required: name of the detector
|
||||
detector_name:
|
||||
# Required: type of the detector
|
||||
# Frigate provided types include 'cpu', 'edgetpu', 'openvino' and 'tensorrt' (default: shown below)
|
||||
# Additional detector types can also be plugged in.
|
||||
# Detectors may require additional configuration.
|
||||
# Refer to the Detectors configuration page for more information.
|
||||
type: cpu
|
||||
|
||||
# Optional: Database configuration
|
||||
database:
|
||||
# The path to store the SQLite DB (default: shown below)
|
||||
path: /config/frigate.db
|
||||
|
||||
# Optional: model modifications
|
||||
model:
|
||||
# Optional: path to the model (default: automatic based on detector)
|
||||
path: /edgetpu_model.tflite
|
||||
# Optional: path to the labelmap (default: shown below)
|
||||
labelmap_path: /labelmap.txt
|
||||
# Required: Object detection model input width (default: shown below)
|
||||
width: 320
|
||||
# Required: Object detection model input height (default: shown below)
|
||||
height: 320
|
||||
# Optional: Object detection model input colorspace
|
||||
# Valid values are rgb, bgr, or yuv. (default: shown below)
|
||||
input_pixel_format: rgb
|
||||
# Optional: Object detection model input tensor format
|
||||
# Valid values are nhwc or nchw (default: shown below)
|
||||
input_tensor: nhwc
|
||||
# Optional: Object detection model type, currently only used with the OpenVINO detector
|
||||
# Valid values are ssd, yolox, yolov5, or yolov8 (default: shown below)
|
||||
model_type: ssd
|
||||
# Optional: Label name modifications. These are merged into the standard labelmap.
|
||||
labelmap:
|
||||
2: vehicle
|
||||
|
||||
# Optional: Audio Events Configuration
|
||||
# NOTE: Can be overridden at the camera level
|
||||
audio:
|
||||
# Optional: Enable audio events (default: shown below)
|
||||
enabled: False
|
||||
# Optional: Configure the amount of seconds without detected audio to end the event (default: shown below)
|
||||
max_not_heard: 30
|
||||
# Optional: Configure the min rms volume required to run audio detection (default: shown below)
|
||||
# As a rule of thumb:
|
||||
# - 200 - high sensitivity
|
||||
# - 500 - medium sensitivity
|
||||
# - 1000 - low sensitivity
|
||||
min_volume: 500
|
||||
# Optional: Types of audio to listen for (default: shown below)
|
||||
listen:
|
||||
- bark
|
||||
- fire_alarm
|
||||
- scream
|
||||
- speech
|
||||
- yell
|
||||
# Optional: Filters to configure detection.
|
||||
filters:
|
||||
# Label that matches label in listen config.
|
||||
speech:
|
||||
# Minimum score that triggers an audio event (default: shown below)
|
||||
threshold: 0.8
|
||||
|
||||
# Optional: logger verbosity settings
|
||||
logger:
|
||||
# Optional: Default log verbosity (default: shown below)
|
||||
default: info
|
||||
# Optional: Component specific logger overrides
|
||||
logs:
|
||||
frigate.event: debug
|
||||
|
||||
# Optional: set environment variables
|
||||
environment_vars:
|
||||
EXAMPLE_VAR: value
|
||||
|
||||
# Optional: birdseye configuration
|
||||
# NOTE: Can (enabled, mode) be overridden at the camera level
|
||||
birdseye:
|
||||
# Optional: Enable birdseye view (default: shown below)
|
||||
enabled: True
|
||||
# Optional: Restream birdseye via RTSP (default: shown below)
|
||||
# NOTE: Enabling this will set birdseye to run 24/7 which may increase CPU usage somewhat.
|
||||
restream: False
|
||||
# Optional: Width of the output resolution (default: shown below)
|
||||
width: 1280
|
||||
# Optional: Height of the output resolution (default: shown below)
|
||||
height: 720
|
||||
# Optional: Encoding quality of the mpeg1 feed (default: shown below)
|
||||
# 1 is the highest quality, and 31 is the lowest. Lower quality feeds utilize less CPU resources.
|
||||
quality: 8
|
||||
# Optional: Mode of the view. Available options are: objects, motion, and continuous
|
||||
# objects - cameras are included if they have had a tracked object within the last 30 seconds
|
||||
# motion - cameras are included if motion was detected in the last 30 seconds
|
||||
# continuous - all cameras are included always
|
||||
mode: objects
|
||||
|
||||
# Optional: ffmpeg configuration
|
||||
# More information about presets at https://docs.frigate.video/configuration/ffmpeg_presets
|
||||
ffmpeg:
|
||||
# Optional: global ffmpeg args (default: shown below)
|
||||
global_args: -hide_banner -loglevel warning -threads 2
|
||||
# Optional: global hwaccel args (default: shown below)
|
||||
# NOTE: See hardware acceleration docs for your specific device
|
||||
hwaccel_args: []
|
||||
# Optional: global input args (default: shown below)
|
||||
input_args: preset-rtsp-generic
|
||||
# Optional: global output args
|
||||
output_args:
|
||||
# Optional: output args for detect streams (default: shown below)
|
||||
detect: -threads 2 -f rawvideo -pix_fmt yuv420p
|
||||
# Optional: output args for record streams (default: shown below)
|
||||
record: preset-record-generic
|
||||
# Optional: output args for rtmp streams (default: shown below)
|
||||
rtmp: preset-rtmp-generic
|
||||
# Optional: Time in seconds to wait before ffmpeg retries connecting to the camera. (default: shown below)
|
||||
# If set too low, frigate will retry a connection to the camera's stream too frequently, using up the limited streams some cameras can allow at once
|
||||
# If set too high, then if a ffmpeg crash or camera stream timeout occurs, you could potentially lose up to a maximum of retry_interval second(s) of footage
|
||||
# NOTE: this can be a useful setting for Wireless / Battery cameras to reduce how much footage is potentially lost during a connection timeout.
|
||||
retry_interval: 10
|
||||
|
||||
# Optional: Detect configuration
|
||||
# NOTE: Can be overridden at the camera level
|
||||
detect:
|
||||
# Optional: width of the frame for the input with the detect role (default: shown below)
|
||||
width: 1280
|
||||
# Optional: height of the frame for the input with the detect role (default: shown below)
|
||||
height: 720
|
||||
# Optional: desired fps for your camera for the input with the detect role (default: shown below)
|
||||
# NOTE: Recommended value of 5. Ideally, try and reduce your FPS on the camera.
|
||||
fps: 5
|
||||
# Optional: enables detection for the camera (default: True)
|
||||
enabled: True
|
||||
# Optional: Number of frames without a detection before Frigate considers an object to be gone. (default: 5x the frame rate)
|
||||
max_disappeared: 25
|
||||
# Optional: Configuration for stationary object tracking
|
||||
stationary:
|
||||
# Optional: Frequency for confirming stationary objects (default: same as threshold)
|
||||
# When set to 1, object detection will run to confirm the object still exists on every frame.
|
||||
# If set to 10, object detection will run to confirm the object still exists on every 10th frame.
|
||||
interval: 50
|
||||
# Optional: Number of frames without a position change for an object to be considered stationary (default: 10x the frame rate or 10s)
|
||||
threshold: 50
|
||||
# Optional: Define a maximum number of frames for tracking a stationary object (default: not set, track forever)
|
||||
# This can help with false positives for objects that should only be stationary for a limited amount of time.
|
||||
# It can also be used to disable stationary object tracking. For example, you may want to set a value for person, but leave
|
||||
# car at the default.
|
||||
# WARNING: Setting these values overrides default behavior and disables stationary object tracking.
|
||||
# There are very few situations where you would want it disabled. It is NOT recommended to
|
||||
# copy these values from the example config into your config unless you know they are needed.
|
||||
max_frames:
|
||||
# Optional: Default for all object types (default: not set, track forever)
|
||||
default: 3000
|
||||
# Optional: Object specific values
|
||||
objects:
|
||||
person: 1000
|
||||
# Optional: Milliseconds to offset detect annotations by (default: shown below).
|
||||
# There can often be latency between a recording and the detect process,
|
||||
# especially when using separate streams for detect and record.
|
||||
# Use this setting to make the timeline bounding boxes more closely align
|
||||
# with the recording. The value can be positive or negative.
|
||||
# TIP: Imagine there is an event clip with a person walking from left to right.
|
||||
# If the event timeline bounding box is consistently to the left of the person
|
||||
# then the value should be decreased. Similarly, if a person is walking from
|
||||
# left to right and the bounding box is consistently ahead of the person
|
||||
# then the value should be increased.
|
||||
# TIP: This offset is dynamic so you can change the value and it will update existing
|
||||
# events, this makes it easy to tune.
|
||||
# WARNING: Fast moving objects will likely not have the bounding box align.
|
||||
annotation_offset: 0
|
||||
|
||||
# Optional: Object configuration
|
||||
# NOTE: Can be overridden at the camera level
|
||||
objects:
|
||||
# Optional: list of objects to track from labelmap.txt (default: shown below)
|
||||
track:
|
||||
- person
|
||||
# Optional: mask to prevent all object types from being detected in certain areas (default: no mask)
|
||||
# Checks based on the bottom center of the bounding box of the object.
|
||||
# NOTE: This mask is COMBINED with the object type specific mask below
|
||||
mask: 0,0,1000,0,1000,200,0,200
|
||||
# Optional: filters to reduce false positives for specific object types
|
||||
filters:
|
||||
person:
|
||||
# Optional: minimum width*height of the bounding box for the detected object (default: 0)
|
||||
min_area: 5000
|
||||
# Optional: maximum width*height of the bounding box for the detected object (default: 24000000)
|
||||
max_area: 100000
|
||||
# Optional: minimum width/height of the bounding box for the detected object (default: 0)
|
||||
min_ratio: 0.5
|
||||
# Optional: maximum width/height of the bounding box for the detected object (default: 24000000)
|
||||
max_ratio: 2.0
|
||||
# Optional: minimum score for the object to initiate tracking (default: shown below)
|
||||
min_score: 0.5
|
||||
# Optional: minimum decimal percentage for tracked object's computed score to be considered a true positive (default: shown below)
|
||||
threshold: 0.7
|
||||
# Optional: mask to prevent this object type from being detected in certain areas (default: no mask)
|
||||
# Checks based on the bottom center of the bounding box of the object
|
||||
mask: 0,0,1000,0,1000,200,0,200
|
||||
|
||||
# Optional: Motion configuration
|
||||
# NOTE: Can be overridden at the camera level
|
||||
motion:
|
||||
# Optional: The threshold passed to cv2.threshold to determine if a pixel is different enough to be counted as motion. (default: shown below)
|
||||
# Increasing this value will make motion detection less sensitive and decreasing it will make motion detection more sensitive.
|
||||
# The value should be between 1 and 255.
|
||||
threshold: 30
|
||||
# Optional: The percentage of the image used to detect lightning or other substantial changes where motion detection
|
||||
# needs to recalibrate. (default: shown below)
|
||||
# Increasing this value will make motion detection more likely to consider lightning or ir mode changes as valid motion.
|
||||
# Decreasing this value will make motion detection more likely to ignore large amounts of motion such as a person approaching
|
||||
# a doorbell camera.
|
||||
lightning_threshold: 0.8
|
||||
# Optional: Minimum size in pixels in the resized motion image that counts as motion (default: shown below)
|
||||
# Increasing this value will prevent smaller areas of motion from being detected. Decreasing will
|
||||
# make motion detection more sensitive to smaller moving objects.
|
||||
# As a rule of thumb:
|
||||
# - 10 - high sensitivity
|
||||
# - 30 - medium sensitivity
|
||||
# - 50 - low sensitivity
|
||||
contour_area: 10
|
||||
# Optional: Alpha value passed to cv2.accumulateWeighted when averaging frames to determine the background (default: shown below)
|
||||
# Higher values mean the current frame impacts the average a lot, and a new object will be averaged into the background faster.
|
||||
# Low values will cause things like moving shadows to be detected as motion for longer.
|
||||
# https://www.geeksforgeeks.org/background-subtraction-in-an-image-using-concept-of-running-average/
|
||||
frame_alpha: 0.01
|
||||
# Optional: Height of the resized motion frame (default: 100)
|
||||
# Higher values will result in more granular motion detection at the expense of higher CPU usage.
|
||||
# Lower values result in less CPU, but small changes may not register as motion.
|
||||
frame_height: 100
|
||||
# Optional: motion mask
|
||||
# NOTE: see docs for more detailed info on creating masks
|
||||
mask: 0,900,1080,900,1080,1920,0,1920
|
||||
# Optional: improve contrast (default: shown below)
|
||||
# Enables dynamic contrast improvement. This should help improve night detections at the cost of making motion detection more sensitive
|
||||
# for daytime.
|
||||
improve_contrast: True
|
||||
# Optional: Delay when updating camera motion through MQTT from ON -> OFF (default: shown below).
|
||||
mqtt_off_delay: 30
|
||||
|
||||
# Optional: Record configuration
|
||||
# NOTE: Can be overridden at the camera level
|
||||
record:
|
||||
# Optional: Enable recording (default: shown below)
|
||||
# WARNING: If recording is disabled in the config, turning it on via
|
||||
# the UI or MQTT later will have no effect.
|
||||
enabled: False
|
||||
# Optional: Number of minutes to wait between cleanup runs (default: shown below)
|
||||
# This can be used to reduce the frequency of deleting recording segments from disk if you want to minimize i/o
|
||||
expire_interval: 60
|
||||
# Optional: Sync recordings with disk on startup (default: shown below).
|
||||
sync_on_startup: False
|
||||
# Optional: Retention settings for recording
|
||||
retain:
|
||||
# Optional: Number of days to retain recordings regardless of events (default: shown below)
|
||||
# NOTE: This should be set to 0 and retention should be defined in events section below
|
||||
# if you only want to retain recordings of events.
|
||||
days: 0
|
||||
# Optional: Mode for retention. Available options are: all, motion, and active_objects
|
||||
# all - save all recording segments regardless of activity
|
||||
# motion - save all recordings segments with any detected motion
|
||||
# active_objects - save all recording segments with active/moving objects
|
||||
# NOTE: this mode only applies when the days setting above is greater than 0
|
||||
mode: all
|
||||
# Optional: Recording Export Settings
|
||||
export:
|
||||
# Optional: Timelapse Output Args (default: shown below).
|
||||
# NOTE: The default args are set to fit 24 hours of recording into 1 hour playback.
|
||||
# See https://stackoverflow.com/a/58268695 for more info on how these args work.
|
||||
# As an example: if you wanted to go from 24 hours to 30 minutes that would be going
|
||||
# from 86400 seconds to 1800 seconds which would be 1800 / 86400 = 0.02.
|
||||
# The -r (framerate) dictates how smooth the output video is.
|
||||
# So the args would be -vf setpts=0.02*PTS -r 30 in that case.
|
||||
timelapse_args: "-vf setpts=0.04*PTS -r 30"
|
||||
# Optional: Event recording settings
|
||||
events:
|
||||
# Optional: Number of seconds before the event to include (default: shown below)
|
||||
pre_capture: 5
|
||||
# Optional: Number of seconds after the event to include (default: shown below)
|
||||
post_capture: 5
|
||||
# Optional: Objects to save recordings for. (default: all tracked objects)
|
||||
objects:
|
||||
- person
|
||||
# Optional: Restrict recordings to objects that entered any of the listed zones (default: no required zones)
|
||||
required_zones: []
|
||||
# Optional: Retention settings for recordings of events
|
||||
retain:
|
||||
# Required: Default retention days (default: shown below)
|
||||
default: 10
|
||||
# Optional: Mode for retention. (default: shown below)
|
||||
# all - save all recording segments for events regardless of activity
|
||||
# motion - save all recordings segments for events with any detected motion
|
||||
# active_objects - save all recording segments for event with active/moving objects
|
||||
#
|
||||
# NOTE: If the retain mode for the camera is more restrictive than the mode configured
|
||||
# here, the segments will already be gone by the time this mode is applied.
|
||||
# For example, if the camera retain mode is "motion", the segments without motion are
|
||||
# never stored, so setting the mode to "all" here won't bring them back.
|
||||
mode: motion
|
||||
# Optional: Per object retention days
|
||||
objects:
|
||||
person: 15
|
||||
|
||||
# Optional: Configuration for the jpg snapshots written to the clips directory for each event
|
||||
# NOTE: Can be overridden at the camera level
|
||||
snapshots:
|
||||
# Optional: Enable writing jpg snapshot to /media/frigate/clips (default: shown below)
|
||||
enabled: False
|
||||
# Optional: save a clean PNG copy of the snapshot image (default: shown below)
|
||||
clean_copy: True
|
||||
# Optional: print a timestamp on the snapshots (default: shown below)
|
||||
timestamp: False
|
||||
# Optional: draw bounding box on the snapshots (default: shown below)
|
||||
bounding_box: False
|
||||
# Optional: crop the snapshot (default: shown below)
|
||||
crop: False
|
||||
# Optional: height to resize the snapshot to (default: original size)
|
||||
height: 175
|
||||
# Optional: Restrict snapshots to objects that entered any of the listed zones (default: no required zones)
|
||||
required_zones: []
|
||||
# Optional: Camera override for retention settings (default: global values)
|
||||
retain:
|
||||
# Required: Default retention days (default: shown below)
|
||||
default: 10
|
||||
# Optional: Per object retention days
|
||||
objects:
|
||||
person: 15
|
||||
# Optional: quality of the encoded jpeg, 0-100 (default: shown below)
|
||||
quality: 70
|
||||
|
||||
# Optional: RTMP configuration
|
||||
# NOTE: RTMP is deprecated in favor of restream
|
||||
# NOTE: Can be overridden at the camera level
|
||||
rtmp:
|
||||
# Optional: Enable the RTMP stream (default: False)
|
||||
enabled: False
|
||||
|
||||
# Optional: Restream configuration
|
||||
# Uses https://github.com/AlexxIT/go2rtc (v1.8.1)
|
||||
go2rtc:
|
||||
|
||||
# Optional: jsmpeg stream configuration for WebUI
|
||||
live:
|
||||
# Optional: Set the name of the stream that should be used for live view
|
||||
# in frigate WebUI. (default: name of camera)
|
||||
stream_name: camera_name
|
||||
# Optional: Set the height of the jsmpeg stream. (default: 720)
|
||||
# This must be less than or equal to the height of the detect stream. Lower resolutions
|
||||
# reduce bandwidth required for viewing the jsmpeg stream. Width is computed to match known aspect ratio.
|
||||
height: 720
|
||||
# Optional: Set the encode quality of the jsmpeg stream (default: shown below)
|
||||
# 1 is the highest quality, and 31 is the lowest. Lower quality feeds utilize less CPU resources.
|
||||
quality: 8
|
||||
|
||||
# Optional: in-feed timestamp style configuration
|
||||
# NOTE: Can be overridden at the camera level
|
||||
timestamp_style:
|
||||
# Optional: Position of the timestamp (default: shown below)
|
||||
# "tl" (top left), "tr" (top right), "bl" (bottom left), "br" (bottom right)
|
||||
position: "tl"
|
||||
# Optional: Format specifier conform to the Python package "datetime" (default: shown below)
|
||||
# Additional Examples:
|
||||
# german: "%d.%m.%Y %H:%M:%S"
|
||||
format: "%m/%d/%Y %H:%M:%S"
|
||||
# Optional: Color of font
|
||||
color:
|
||||
# All Required when color is specified (default: shown below)
|
||||
red: 255
|
||||
green: 255
|
||||
blue: 255
|
||||
# Optional: Line thickness of font (default: shown below)
|
||||
thickness: 2
|
||||
# Optional: Effect of lettering (default: shown below)
|
||||
# None (No effect),
|
||||
# "solid" (solid background in inverse color of font)
|
||||
# "shadow" (shadow for font)
|
||||
effect: None
|
||||
|
||||
# Required
|
||||
cameras:
|
||||
# Required: name of the camera
|
||||
back:
|
||||
# Optional: Enable/Disable the camera (default: shown below).
|
||||
# If disabled: config is used but no live stream and no capture etc.
|
||||
# Events/Recordings are still viewable.
|
||||
enabled: True
|
||||
# Required: ffmpeg settings for the camera
|
||||
ffmpeg:
|
||||
# Required: A list of input streams for the camera. See documentation for more information.
|
||||
inputs:
|
||||
# Required: the path to the stream
|
||||
# NOTE: path may include environment variables, which must begin with 'FRIGATE_' and be referenced in {}
|
||||
- path: rtsp://viewer:{FRIGATE_RTSP_PASSWORD}@10.0.10.10:554/cam/realmonitor?channel=1&subtype=2
|
||||
# Required: list of roles for this stream. valid values are: audio,detect,record,rtmp
|
||||
# NOTICE: In addition to assigning the audio, record, and rtmp roles,
|
||||
# they must also be enabled in the camera config.
|
||||
roles:
|
||||
- audio
|
||||
- detect
|
||||
- record
|
||||
- rtmp
|
||||
# Optional: stream specific global args (default: inherit)
|
||||
# global_args:
|
||||
# Optional: stream specific hwaccel args (default: inherit)
|
||||
# hwaccel_args:
|
||||
# Optional: stream specific input args (default: inherit)
|
||||
# input_args:
|
||||
# Optional: camera specific global args (default: inherit)
|
||||
# global_args:
|
||||
# Optional: camera specific hwaccel args (default: inherit)
|
||||
# hwaccel_args:
|
||||
# Optional: camera specific input args (default: inherit)
|
||||
# input_args:
|
||||
# Optional: camera specific output args (default: inherit)
|
||||
# output_args:
|
||||
|
||||
# Optional: timeout for highest scoring image before allowing it
|
||||
# to be replaced by a newer image. (default: shown below)
|
||||
best_image_timeout: 60
|
||||
|
||||
# Optional: zones for this camera
|
||||
zones:
|
||||
# Required: name of the zone
|
||||
# NOTE: This must be different than any camera names, but can match with another zone on another
|
||||
# camera.
|
||||
front_steps:
|
||||
# Required: List of x,y coordinates to define the polygon of the zone.
|
||||
# NOTE: Presence in a zone is evaluated only based on the bottom center of the objects bounding box.
|
||||
coordinates: 545,1077,747,939,788,805
|
||||
# Optional: Number of consecutive frames required for object to be considered present in the zone (default: shown below).
|
||||
inertia: 3
|
||||
# Optional: List of objects that can trigger this zone (default: all tracked objects)
|
||||
objects:
|
||||
- person
|
||||
# Optional: Zone level object filters.
|
||||
# NOTE: The global and camera filters are applied upstream.
|
||||
filters:
|
||||
person:
|
||||
min_area: 5000
|
||||
max_area: 100000
|
||||
threshold: 0.7
|
||||
|
||||
# Optional: Configuration for the jpg snapshots published via MQTT
|
||||
mqtt:
|
||||
# Optional: Enable publishing snapshot via mqtt for camera (default: shown below)
|
||||
# NOTE: Only applies to publishing image data to MQTT via 'frigate/<camera_name>/<object_name>/snapshot'.
|
||||
# All other messages will still be published.
|
||||
enabled: True
|
||||
# Optional: print a timestamp on the snapshots (default: shown below)
|
||||
timestamp: True
|
||||
# Optional: draw bounding box on the snapshots (default: shown below)
|
||||
bounding_box: True
|
||||
# Optional: crop the snapshot (default: shown below)
|
||||
crop: True
|
||||
# Optional: height to resize the snapshot to (default: shown below)
|
||||
height: 270
|
||||
# Optional: jpeg encode quality (default: shown below)
|
||||
quality: 70
|
||||
# Optional: Restrict mqtt messages to objects that entered any of the listed zones (default: no required zones)
|
||||
required_zones: []
|
||||
|
||||
# Optional: Configuration for how camera is handled in the GUI.
|
||||
ui:
|
||||
# Optional: Adjust sort order of cameras in the UI. Larger numbers come later (default: shown below)
|
||||
# By default the cameras are sorted alphabetically.
|
||||
order: 0
|
||||
# Optional: Whether or not to show the camera in the Frigate UI (default: shown below)
|
||||
dashboard: True
|
||||
|
||||
# Optional: connect to ONVIF camera
|
||||
# to enable PTZ controls.
|
||||
onvif:
|
||||
# Required: host of the camera being connected to.
|
||||
host: 0.0.0.0
|
||||
# Optional: ONVIF port for device (default: shown below).
|
||||
port: 8000
|
||||
# Optional: username for login.
|
||||
# NOTE: Some devices require admin to access ONVIF.
|
||||
user: admin
|
||||
# Optional: password for login.
|
||||
password: admin
|
||||
# Optional: PTZ camera object autotracking. Keeps a moving object in
|
||||
# the center of the frame by automatically moving the PTZ camera.
|
||||
autotracking:
|
||||
# Optional: enable/disable object autotracking. (default: shown below)
|
||||
enabled: False
|
||||
# Optional: calibrate the camera on startup (default: shown below)
|
||||
# A calibration will move the PTZ in increments and measure the time it takes to move.
|
||||
# The results are used to help estimate the position of tracked objects after a camera move.
|
||||
# Frigate will update your config file automatically after a calibration with
|
||||
# a "movement_weights" entry for the camera. You should then set calibrate_on_startup to False.
|
||||
calibrate_on_startup: False
|
||||
# Optional: the mode to use for zooming in/out on objects during autotracking. (default: shown below)
|
||||
# Available options are: disabled, absolute, and relative
|
||||
# disabled - don't zoom in/out on autotracked objects, use pan/tilt only
|
||||
# absolute - use absolute zooming (supported by most PTZ capable cameras)
|
||||
# relative - use relative zooming (not supported on all PTZs, but makes concurrent pan/tilt/zoom movements)
|
||||
zooming: disabled
|
||||
# Optional: A value to change the behavior of zooming on autotracked objects. (default: shown below)
|
||||
# A lower value will keep more of the scene in view around a tracked object.
|
||||
# A higher value will zoom in more on a tracked object, but Frigate may lose tracking more quickly.
|
||||
# The value should be between 0.1 and 0.75
|
||||
zoom_factor: 0.3
|
||||
# Optional: list of objects to track from labelmap.txt (default: shown below)
|
||||
track:
|
||||
- person
|
||||
# Required: Begin automatically tracking an object when it enters any of the listed zones.
|
||||
required_zones:
|
||||
- zone_name
|
||||
# Required: Name of ONVIF preset in camera's firmware to return to when tracking is over. (default: shown below)
|
||||
return_preset: home
|
||||
# Optional: Seconds to delay before returning to preset. (default: shown below)
|
||||
timeout: 10
|
||||
# Optional: Values generated automatically by a camera calibration. Do not modify these manually. (default: shown below)
|
||||
movement_weights: []
|
||||
|
||||
# Optional: Configuration for how to sort the cameras in the Birdseye view.
|
||||
birdseye:
|
||||
# Optional: Adjust sort order of cameras in the Birdseye view. Larger numbers come later (default: shown below)
|
||||
# By default the cameras are sorted alphabetically.
|
||||
order: 0
|
||||
|
||||
# Optional
|
||||
ui:
|
||||
# Optional: Set the default live mode for cameras in the UI (default: shown below)
|
||||
live_mode: mse
|
||||
# Optional: Set a timezone to use in the UI (default: use browser local time)
|
||||
# timezone: America/Denver
|
||||
# Optional: Use an experimental recordings / camera view UI (default: shown below)
|
||||
use_experimental: False
|
||||
# Optional: Set the time format used.
|
||||
# Options are browser, 12hour, or 24hour (default: shown below)
|
||||
time_format: browser
|
||||
# Optional: Set the date style for a specified length.
|
||||
# Options are: full, long, medium, short
|
||||
# Examples:
|
||||
# short: 2/11/23
|
||||
# medium: Feb 11, 2023
|
||||
# full: Saturday, February 11, 2023
|
||||
# (default: shown below).
|
||||
date_style: short
|
||||
# Optional: Set the time style for a specified length.
|
||||
# Options are: full, long, medium, short
|
||||
# Examples:
|
||||
# short: 8:14 PM
|
||||
# medium: 8:15:22 PM
|
||||
# full: 8:15:22 PM Mountain Standard Time
|
||||
# (default: shown below).
|
||||
time_style: medium
|
||||
# Optional: Ability to manually override the date / time styling to use strftime format
|
||||
# https://www.gnu.org/software/libc/manual/html_node/Formatting-Calendar-Time.html
|
||||
# possible values are shown above (default: not set)
|
||||
strftime_fmt: "%Y/%m/%d %H:%M"
|
||||
|
||||
# Optional: Telemetry configuration
|
||||
telemetry:
|
||||
# Optional: Enabled network interfaces for bandwidth stats monitoring (default: empty list, let nethogs search all)
|
||||
network_interfaces:
|
||||
- eth
|
||||
- enp
|
||||
- eno
|
||||
- ens
|
||||
- wl
|
||||
- lo
|
||||
# Optional: Configure system stats
|
||||
stats:
|
||||
# Enable AMD GPU stats (default: shown below)
|
||||
amd_gpu_stats: True
|
||||
# Enable Intel GPU stats (default: shown below)
|
||||
intel_gpu_stats: True
|
||||
# Enable network bandwidth stats monitoring for camera ffmpeg processes, go2rtc, and object detectors. (default: shown below)
|
||||
# NOTE: The container must either be privileged or have cap_net_admin, cap_net_raw capabilities enabled.
|
||||
network_bandwidth: False
|
||||
# Optional: Enable the latest version outbound check (default: shown below)
|
||||
# NOTE: If you use the HomeAssistant integration, disabling this will prevent it from reporting new versions
|
||||
version_check: True
|
||||
rtsp:
|
||||
username: "{FRIGATE_GO2RTC_RTSP_USERNAME}"
|
||||
password: "{FRIGATE_GO2RTC_RTSP_PASSWORD}"
|
||||
```
|
||||
|
||||
## Common configuration examples
|
||||
|
||||
Here are some common starter configuration examples. Refer to the [reference config](./reference.md) for detailed information about all the config values.
|
||||
|
||||
### Raspberry Pi Home Assistant Addon with USB Coral
|
||||
|
||||
- Single camera with 720p, 5fps stream for detect
|
||||
- MQTT connected to home assistant mosquitto addon
|
||||
- Hardware acceleration for decoding video
|
||||
- USB Coral detector
|
||||
- Save all video with any detectable motion for 7 days regardless of whether any objects were detected or not
|
||||
- Continue to keep all video if it was during any event for 30 days
|
||||
- Save snapshots for 30 days
|
||||
- Motion mask for the camera timestamp
|
||||
|
||||
```yaml
|
||||
mqtt:
|
||||
host: core-mosquitto
|
||||
user: mqtt-user
|
||||
password: xxxxxxxxxx
|
||||
|
||||
ffmpeg:
|
||||
hwaccel_args: preset-rpi-64-h264
|
||||
|
||||
detectors:
|
||||
coral:
|
||||
type: edgetpu
|
||||
device: usb
|
||||
|
||||
record:
|
||||
enabled: True
|
||||
retain:
|
||||
days: 7
|
||||
mode: motion
|
||||
events:
|
||||
retain:
|
||||
default: 30
|
||||
mode: motion
|
||||
|
||||
snapshots:
|
||||
enabled: True
|
||||
retain:
|
||||
default: 30
|
||||
|
||||
cameras:
|
||||
name_of_your_camera:
|
||||
detect:
|
||||
width: 1280
|
||||
height: 720
|
||||
fps: 5
|
||||
ffmpeg:
|
||||
inputs:
|
||||
- path: rtsp://10.0.10.10:554/rtsp
|
||||
roles:
|
||||
- detect
|
||||
motion:
|
||||
mask:
|
||||
- 0.000,0.427,0.002,0.000,0.999,0.000,0.999,0.781,0.885,0.456,0.700,0.424,0.701,0.311,0.507,0.294,0.453,0.347,0.451,0.400
|
||||
```
|
||||
|
||||
### Standalone Intel Mini PC with USB Coral
|
||||
|
||||
- Single camera with 720p, 5fps stream for detect
|
||||
- MQTT disabled (not integrated with home assistant)
|
||||
- VAAPI hardware acceleration for decoding video
|
||||
- USB Coral detector
|
||||
- Save all video with any detectable motion for 7 days regardless of whether any objects were detected or not
|
||||
- Continue to keep all video if it was during any event for 30 days
|
||||
- Save snapshots for 30 days
|
||||
- Motion mask for the camera timestamp
|
||||
|
||||
```yaml
|
||||
mqtt:
|
||||
enabled: False
|
||||
|
||||
ffmpeg:
|
||||
hwaccel_args: preset-vaapi
|
||||
|
||||
detectors:
|
||||
coral:
|
||||
type: edgetpu
|
||||
device: usb
|
||||
|
||||
record:
|
||||
enabled: True
|
||||
retain:
|
||||
days: 7
|
||||
mode: motion
|
||||
events:
|
||||
retain:
|
||||
default: 30
|
||||
mode: motion
|
||||
|
||||
snapshots:
|
||||
enabled: True
|
||||
retain:
|
||||
default: 30
|
||||
|
||||
cameras:
|
||||
name_of_your_camera:
|
||||
detect:
|
||||
width: 1280
|
||||
height: 720
|
||||
fps: 5
|
||||
ffmpeg:
|
||||
inputs:
|
||||
- path: rtsp://10.0.10.10:554/rtsp
|
||||
roles:
|
||||
- detect
|
||||
motion:
|
||||
mask:
|
||||
- 0.000,0.427,0.002,0.000,0.999,0.000,0.999,0.781,0.885,0.456,0.700,0.424,0.701,0.311,0.507,0.294,0.453,0.347,0.451,0.400
|
||||
```
|
||||
|
||||
### Home Assistant integrated Intel Mini PC with OpenVino
|
||||
|
||||
- Single camera with 720p, 5fps stream for detect
|
||||
- MQTT connected to same mqtt server as home assistant
|
||||
- VAAPI hardware acceleration for decoding video
|
||||
- OpenVino detector
|
||||
- Save all video with any detectable motion for 7 days regardless of whether any objects were detected or not
|
||||
- Continue to keep all video if it was during any event for 30 days
|
||||
- Save snapshots for 30 days
|
||||
- Motion mask for the camera timestamp
|
||||
|
||||
```yaml
|
||||
mqtt:
|
||||
host: 192.168.X.X # <---- same mqtt broker that home assistant uses
|
||||
user: mqtt-user
|
||||
password: xxxxxxxxxx
|
||||
|
||||
ffmpeg:
|
||||
hwaccel_args: preset-vaapi
|
||||
|
||||
detectors:
|
||||
ov:
|
||||
type: openvino
|
||||
device: AUTO
|
||||
model:
|
||||
path: /openvino-model/ssdlite_mobilenet_v2.xml
|
||||
|
||||
model:
|
||||
width: 300
|
||||
height: 300
|
||||
input_tensor: nhwc
|
||||
input_pixel_format: bgr
|
||||
labelmap_path: /openvino-model/coco_91cl_bkgr.txt
|
||||
|
||||
record:
|
||||
enabled: True
|
||||
retain:
|
||||
days: 7
|
||||
mode: motion
|
||||
events:
|
||||
retain:
|
||||
default: 30
|
||||
mode: motion
|
||||
|
||||
snapshots:
|
||||
enabled: True
|
||||
retain:
|
||||
default: 30
|
||||
|
||||
cameras:
|
||||
name_of_your_camera:
|
||||
detect:
|
||||
width: 1280
|
||||
height: 720
|
||||
fps: 5
|
||||
ffmpeg:
|
||||
inputs:
|
||||
- path: rtsp://10.0.10.10:554/rtsp
|
||||
roles:
|
||||
- detect
|
||||
motion:
|
||||
mask:
|
||||
- 0.000,0.427,0.002,0.000,0.999,0.000,0.999,0.781,0.885,0.456,0.700,0.424,0.701,0.311,0.507,0.294,0.453,0.347,0.451,0.400
|
||||
```
|
||||
|
||||
@@ -3,17 +3,17 @@ id: live
|
||||
title: Live View
|
||||
---
|
||||
|
||||
Frigate has different live view options, some of which require the bundled `go2rtc` to be configured as shown in the [step by step guide](/guides/configuring_go2rtc).
|
||||
Frigate intelligently displays your camera streams on the Live view dashboard. Your camera images update once per minute when no detectable activity is occurring to conserve bandwidth and resources. As soon as any motion is detected, cameras seamlessly switch to a live stream.
|
||||
|
||||
## Live View Options
|
||||
## Live View technologies
|
||||
|
||||
Live view options can be selected while viewing the live stream. The options are:
|
||||
Frigate intelligently uses three different streaming technologies to display your camera streams. The highest quality and fluency of the Live view requires the bundled `go2rtc` to be configured as shown in the [step by step guide](/guides/configuring_go2rtc).
|
||||
|
||||
| Source | Latency | Frame Rate | Resolution | Audio | Requires go2rtc | Other Limitations |
|
||||
| ------ | ------- | ------------------------------------- | -------------- | ---------------------------- | --------------- | ------------------------------------------------- |
|
||||
| jsmpeg | low | same as `detect -> fps`, capped at 10 | same as detect | no | no | none |
|
||||
| mse | low | native | native | yes (depends on audio codec) | yes | iPhone requires iOS 17.1+, Firefox is h.264 only |
|
||||
| webrtc | lowest | native | native | yes (depends on audio codec) | yes | requires extra config, doesn't support h.265 |
|
||||
| Source | Latency | Frame Rate | Resolution | Audio | Requires go2rtc | Other Limitations |
|
||||
| ------ | ------- | ------------------------------------- | -------------- | ---------------------------- | --------------- | ------------------------------------------------ |
|
||||
| jsmpeg | low | same as `detect -> fps`, capped at 10 | same as detect | no | no | none |
|
||||
| mse | low | native | native | yes (depends on audio codec) | yes | iPhone requires iOS 17.1+, Firefox is h.264 only |
|
||||
| webrtc | lowest | native | native | yes (depends on audio codec) | yes | requires extra config, doesn't support h.265 |
|
||||
|
||||
### Audio Support
|
||||
|
||||
@@ -79,7 +79,7 @@ WebRTC works by creating a TCP or UDP connection on port `8555`. However, it req
|
||||
- stun:8555
|
||||
```
|
||||
|
||||
- For access through Tailscale, the Frigate system's Tailscale IP must be added as a WebRTC candidate. Tailscale IPs all start with `100.`, and are reserved within the `100.0.0.0/8` CIDR block.
|
||||
- For access through Tailscale, the Frigate system's Tailscale IP must be added as a WebRTC candidate. Tailscale IPs all start with `100.`, and are reserved within the `100.64.0.0/10` CIDR block.
|
||||
|
||||
:::tip
|
||||
|
||||
@@ -104,6 +104,7 @@ If you are having difficulties getting WebRTC to work and you are running Frigat
|
||||
If not running in host mode, port 8555 will need to be mapped for the container:
|
||||
|
||||
docker-compose.yml
|
||||
|
||||
```yaml
|
||||
services:
|
||||
frigate:
|
||||
@@ -115,4 +116,4 @@ services:
|
||||
|
||||
:::
|
||||
|
||||
See [go2rtc WebRTC docs](https://github.com/AlexxIT/go2rtc/tree/v1.8.1#module-webrtc) for more information about this.
|
||||
See [go2rtc WebRTC docs](https://github.com/AlexxIT/go2rtc/tree/v1.8.3#module-webrtc) for more information about this.
|
||||
|
||||
@@ -3,41 +3,49 @@ id: masks
|
||||
title: Masks
|
||||
---
|
||||
|
||||
There are two types of masks available:
|
||||
## Motion masks
|
||||
|
||||
**Motion masks**: Motion masks are used to prevent unwanted types of motion from triggering detection. Try watching the debug feed with `Motion Boxes` enabled to see what may be regularly detected as motion. For example, you want to mask out your timestamp, the sky, rooftops, etc. Keep in mind that this mask only prevents motion from being detected and does not prevent objects from being detected if object detection was started due to motion in unmasked areas. Motion is also used during object tracking to refine the object detection area in the next frame. Over masking will make it more difficult for objects to be tracked. To see this effect, create a mask, and then watch the video feed with `Motion Boxes` enabled again.
|
||||
Motion masks are used to prevent unwanted types of motion from triggering detection. Try watching the Debug feed (Settings --> Debug) with `Motion Boxes` enabled to see what may be regularly detected as motion. For example, you want to mask out your timestamp, the sky, rooftops, etc. Keep in mind that this mask only prevents motion from being detected and does not prevent objects from being detected if object detection was started due to motion in unmasked areas. Motion is also used during object tracking to refine the object detection area in the next frame. _Over-masking will make it more difficult for objects to be tracked._
|
||||
|
||||
**Object filter masks**: Object filter masks are used to filter out false positives for a given object type based on location. These should be used to filter any areas where it is not possible for an object of that type to be. The bottom center of the detected object's bounding box is evaluated against the mask. If it is in a masked area, it is assumed to be a false positive. For example, you may want to mask out rooftops, walls, the sky, treetops for people. For cars, masking locations other than the street or your driveway will tell Frigate that anything in your yard is a false positive.
|
||||
See [further clarification](#further-clarification) below on why you may not want to use a motion mask.
|
||||
|
||||
## Object filter masks
|
||||
|
||||
Object filter masks are used to filter out false positives for a given object type based on location. These should be used to filter any areas where it is not possible for an object of that type to be. The bottom center of the detected object's bounding box is evaluated against the mask. If it is in a masked area, it is assumed to be a false positive. For example, you may want to mask out rooftops, walls, the sky, treetops for people. For cars, masking locations other than the street or your driveway will tell Frigate that anything in your yard is a false positive.
|
||||
|
||||
Object filter masks can be used to filter out stubborn false positives in fixed locations. For example, the base of this tree may be frequently detected as a person. The following image shows an example of an object filter mask (shaded red area) over the location where the bottom center is typically located to filter out person detections in a precise location.
|
||||
|
||||

|
||||
|
||||
## Using the mask creator
|
||||
|
||||
To create a poly mask:
|
||||
|
||||
1. Visit the Web UI
|
||||
1. Click the camera you wish to create a mask for
|
||||
1. Select "Debug" at the top
|
||||
1. Expand the "Options" below the video feed
|
||||
1. Click "Mask & Zone creator"
|
||||
1. Click "Add" on the type of mask or zone you would like to create
|
||||
1. Click on the camera's latest image to create a masked area. The yaml representation will be updated in real-time
|
||||
1. When you've finished creating your mask, click "Copy" and paste the contents into your config file and restart Frigate
|
||||
2. Click/tap the gear icon and open "Settings"
|
||||
3. Select "Mask / zone editor"
|
||||
4. At the top right, select the camera you wish to create a mask or zone for
|
||||
5. Click the plus icon under the type of mask or zone you would like to create
|
||||
6. Click on the camera's latest image to create the points for a masked area. Click the first point again to close the polygon.
|
||||
7. When you've finished creating your mask, press Save.
|
||||
8. Restart Frigate to apply your changes.
|
||||
|
||||
Example of a finished row corresponding to the below example image:
|
||||
Your config file will be updated with the relative coordinates of the mask/zone:
|
||||
|
||||
```yaml
|
||||
motion:
|
||||
mask: "0,461,3,0,1919,0,1919,843,1699,492,1344,458,1346,336,973,317,869,375,866,432"
|
||||
mask: "0.000,0.427,0.002,0.000,0.999,0.000,0.999,0.781,0.885,0.456,0.700,0.424,0.701,0.311,0.507,0.294,0.453,0.347,0.451,0.400"
|
||||
```
|
||||
|
||||
Multiple masks can be listed.
|
||||
Multiple masks can be listed in your config.
|
||||
|
||||
```yaml
|
||||
motion:
|
||||
mask:
|
||||
- 458,1346,336,973,317,869,375,866,432
|
||||
- 0,461,3,0,1919,0,1919,843,1699,492,1344
|
||||
- 0.239,1.246,0.175,0.901,0.165,0.805,0.195,0.802
|
||||
- 0.000,0.427,0.002,0.000,0.999,0.000,0.999,0.781,0.885,0.456
|
||||
```
|
||||
|
||||

|
||||
|
||||
### Further Clarification
|
||||
|
||||
This is a response to a [question posed on reddit](https://www.reddit.com/r/homeautomation/comments/ppxdve/replacing_my_doorbell_with_a_security_camera_a_6/hd876w4?utm_source=share&utm_medium=web2x&context=3):
|
||||
|
||||
101
docs/docs/configuration/motion_detection.md
Normal file
101
docs/docs/configuration/motion_detection.md
Normal file
@@ -0,0 +1,101 @@
|
||||
---
|
||||
id: motion_detection
|
||||
title: Motion Detection
|
||||
---
|
||||
|
||||
# Tuning Motion Detection
|
||||
|
||||
Frigate uses motion detection as a first line check to see if there is anything happening in the frame worth checking with object detection.
|
||||
|
||||
Once motion is detected, it tries to group up nearby areas of motion together in hopes of identifying a rectangle in the image that will capture the area worth inspecting. These are the red "motion boxes" you see in the debug viewer.
|
||||
|
||||
## The Goal
|
||||
|
||||
The default motion settings should work well for the majority of cameras, however there are cases where tuning motion detection can lead to better and more optimal results. Each camera has its own environment with different variables that affect motion, this means that the same motion settings will not fit all of your cameras.
|
||||
|
||||
Before tuning motion it is important to understand the goal. In an optimal configuration, motion from people and cars would be detected, but not grass moving, lighting changes, timestamps, etc. If your motion detection is too sensitive, you will experience higher CPU loads and greater false positives from the increased rate of object detection. If it is not sensitive enough, you will miss events.
|
||||
|
||||
## Create Motion Masks
|
||||
|
||||
First, mask areas with regular motion not caused by the objects you want to detect. The best way to find candidates for motion masks is by watching the debug stream with motion boxes enabled. Good use cases for motion masks are timestamps or tree limbs and large bushes that regularly move due to wind. When possible, avoid creating motion masks that would block motion detection for objects you want to track **even if they are in locations where you don't want events**. Motion masks should not be used to avoid detecting objects in specific areas. More details can be found [in the masks docs.](/configuration/masks.md).
|
||||
|
||||
## Prepare For Testing
|
||||
|
||||
The easiest way to tune motion detection is to use the Frigate UI under Settings > Motion Tuner. This screen allows the changing of motion detection values live to easily see the immediate effect on what is detected as motion.
|
||||
|
||||
## Tuning Motion Detection During The Day
|
||||
|
||||
Now that things are set up, find a time to tune that represents normal circumstances. For example, if you tune your motion on a day that is sunny and windy you may find later that the motion settings are not sensitive enough on a cloudy and still day.
|
||||
|
||||
:::note
|
||||
|
||||
Remember that motion detection is just used to determine when object detection should be used. You should aim to have motion detection sensitive enough that you won't miss events from objects you want to detect with object detection. The goal is to prevent object detection from running constantly for every small pixel change in the image. Windy days are still going to result in lots of motion being detected.
|
||||
|
||||
:::
|
||||
|
||||
### Threshold
|
||||
|
||||
The threshold value dictates how much of a change in a pixels luminance is required to be considered motion.
|
||||
|
||||
```yaml
|
||||
# default threshold value
|
||||
motion:
|
||||
# Optional: The threshold passed to cv2.threshold to determine if a pixel is different enough to be counted as motion. (default: shown below)
|
||||
# Increasing this value will make motion detection less sensitive and decreasing it will make motion detection more sensitive.
|
||||
# The value should be between 1 and 255.
|
||||
threshold: 30
|
||||
```
|
||||
|
||||
Lower values mean motion detection is more sensitive to changes in color, making it more likely for example to detect motion when a brown dogs blends in with a brown fence or a person wearing a red shirt blends in with a red car. If the threshold is too low however, it may detect things like grass blowing in the wind, shadows, etc. to be detected as motion.
|
||||
|
||||
Watching the motion boxes in the debug view, increase the threshold until you only see motion that is visible to the eye. Once this is done, it is important to test and ensure that desired motion is still detected.
|
||||
|
||||
### Contour Area
|
||||
|
||||
```yaml
|
||||
# default contour_area value
|
||||
motion:
|
||||
# Optional: Minimum size in pixels in the resized motion image that counts as motion (default: shown below)
|
||||
# Increasing this value will prevent smaller areas of motion from being detected. Decreasing will
|
||||
# make motion detection more sensitive to smaller moving objects.
|
||||
# As a rule of thumb:
|
||||
# - 10 - high sensitivity
|
||||
# - 30 - medium sensitivity
|
||||
# - 50 - low sensitivity
|
||||
contour_area: 10
|
||||
```
|
||||
|
||||
Once the threshold calculation is run, the pixels that have changed are grouped together. The contour area value is used to decide which groups of changed pixels qualify as motion. Smaller values are more sensitive meaning people that are far away, small animals, etc. are more likely to be detected as motion, but it also means that small changes in shadows, leaves, etc. are detected as motion. Higher values are less sensitive meaning these things won't be detected as motion but with the risk that desired motion won't be detected until closer to the camera.
|
||||
|
||||
Watching the motion boxes in the debug view, adjust the contour area until there are no motion boxes smaller than the smallest you'd expect frigate to detect something moving.
|
||||
|
||||
### Improve Contrast
|
||||
|
||||
At this point if motion is working as desired there is no reason to continue with tuning for the day. If you were unable to find a balance between desired and undesired motion being detected, you can try disabling improve contrast and going back to the threshold and contour area steps.
|
||||
|
||||
## Tuning Motion Detection During The Night
|
||||
|
||||
Once daytime motion detection is tuned, there is a chance that the settings will work well for motion detection during the night as well. If this is the case then the preferred settings can be written to the config file and left alone.
|
||||
|
||||
However, if the preferred day settings do not work well at night it is recommended to use HomeAssistant or some other solution to automate changing the settings. That way completely separate sets of motion settings can be used for optimal day and night motion detection.
|
||||
|
||||
## Tuning For Large Changes In Motion
|
||||
|
||||
```yaml
|
||||
# default lightning_threshold:
|
||||
motion:
|
||||
# Optional: The percentage of the image used to detect lightning or other substantial changes where motion detection
|
||||
# needs to recalibrate. (default: shown below)
|
||||
# Increasing this value will make motion detection more likely to consider lightning or ir mode changes as valid motion.
|
||||
# Decreasing this value will make motion detection more likely to ignore large amounts of motion such as a person approaching
|
||||
# a doorbell camera.
|
||||
lightning_threshold: 0.8
|
||||
```
|
||||
|
||||
:::tip
|
||||
|
||||
Some cameras like doorbell cameras may have missed detections when someone walks directly in front of the camera and the lightning_threshold causes motion detection to be re-calibrated. In this case, it may be desirable to increase the `lightning_threshold` to ensure these events are not missed.
|
||||
|
||||
:::
|
||||
|
||||
Large changes in motion like PTZ moves and camera switches between Color and IR mode should result in no motion detection. This is done via the `lightning_threshold` configuration. It is defined as the percentage of the image used to detect lightning or other substantial changes where motion detection needs to recalibrate. Increasing this value will make motion detection more likely to consider lightning or IR mode changes as valid motion. Decreasing this value will make motion detection more likely to ignore large amounts of motion such as a person approaching a doorbell camera.
|
||||
@@ -5,12 +5,18 @@ title: Object Detectors
|
||||
|
||||
# Officially Supported Detectors
|
||||
|
||||
Frigate provides the following builtin detector types: `cpu`, `edgetpu`, `openvino`, and `tensorrt`. By default, Frigate will use a single CPU detector. Other detectors may require additional configuration as described below. When using multiple detectors they will run in dedicated processes, but pull from a common queue of detection requests from across all cameras.
|
||||
Frigate provides the following builtin detector types: `cpu`, `edgetpu`, `openvino`, `tensorrt`, and `rknn`. By default, Frigate will use a single CPU detector. Other detectors may require additional configuration as described below. When using multiple detectors they will run in dedicated processes, but pull from a common queue of detection requests from across all cameras.
|
||||
|
||||
## CPU Detector (not recommended)
|
||||
|
||||
The CPU detector type runs a TensorFlow Lite model utilizing the CPU without hardware acceleration. It is recommended to use a hardware accelerated detector type instead for better performance. To configure a CPU based detector, set the `"type"` attribute to `"cpu"`.
|
||||
|
||||
:::tip
|
||||
|
||||
If you do not have GPU or Edge TPU hardware, using the [OpenVINO Detector](#openvino-detector) is often more efficient than using the CPU detector.
|
||||
|
||||
:::
|
||||
|
||||
The number of threads used by the interpreter can be specified using the `"num_threads"` attribute, and defaults to `3.`
|
||||
|
||||
A TensorFlow Lite model is provided in the container at `/cpu_model.tflite` and is used by this detector type by default. To provide your own model, bind mount the file into the container and provide the path with `model.path`.
|
||||
@@ -29,14 +35,20 @@ detectors:
|
||||
|
||||
When using CPU detectors, you can add one CPU detector per camera. Adding more detectors than the number of cameras should not improve performance.
|
||||
|
||||
## Edge-TPU Detector
|
||||
## Edge TPU Detector
|
||||
|
||||
The EdgeTPU detector type runs a TensorFlow Lite model utilizing the Google Coral delegate for hardware acceleration. To configure an EdgeTPU detector, set the `"type"` attribute to `"edgetpu"`.
|
||||
The Edge TPU detector type runs a TensorFlow Lite model utilizing the Google Coral delegate for hardware acceleration. To configure an Edge TPU detector, set the `"type"` attribute to `"edgetpu"`.
|
||||
|
||||
The EdgeTPU device can be specified using the `"device"` attribute according to the [Documentation for the TensorFlow Lite Python API](https://coral.ai/docs/edgetpu/multiple-edgetpu/#using-the-tensorflow-lite-python-api). If not set, the delegate will use the first device it finds.
|
||||
The Edge TPU device can be specified using the `"device"` attribute according to the [Documentation for the TensorFlow Lite Python API](https://coral.ai/docs/edgetpu/multiple-edgetpu/#using-the-tensorflow-lite-python-api). If not set, the delegate will use the first device it finds.
|
||||
|
||||
A TensorFlow Lite model is provided in the container at `/edgetpu_model.tflite` and is used by this detector type by default. To provide your own model, bind mount the file into the container and provide the path with `model.path`.
|
||||
|
||||
:::tip
|
||||
|
||||
See [common Edge TPU troubleshooting steps](/troubleshooting/edgetpu) if the Edge TPU is not detected.
|
||||
|
||||
:::
|
||||
|
||||
### Single USB Coral
|
||||
|
||||
```yaml
|
||||
@@ -95,11 +107,11 @@ detectors:
|
||||
|
||||
## OpenVINO Detector
|
||||
|
||||
The OpenVINO detector type runs an OpenVINO IR model on Intel CPU, GPU and VPU hardware. To configure an OpenVINO detector, set the `"type"` attribute to `"openvino"`.
|
||||
The OpenVINO detector type runs an OpenVINO IR model on AMD and Intel CPUs, Intel GPUs and Intel VPU hardware. To configure an OpenVINO detector, set the `"type"` attribute to `"openvino"`.
|
||||
|
||||
The OpenVINO device to be used is specified using the `"device"` attribute according to the naming conventions in the [Device Documentation](https://docs.openvino.ai/latest/openvino_docs_OV_UG_Working_with_devices.html). Other supported devices could be `AUTO`, `CPU`, `GPU`, `MYRIAD`, etc. If not specified, the default OpenVINO device will be selected by the `AUTO` plugin.
|
||||
|
||||
OpenVINO is supported on 6th Gen Intel platforms (Skylake) and newer. A supported Intel platform is required to use the `GPU` device with OpenVINO. The `MYRIAD` device may be run on any platform, including Arm devices. For detailed system requirements, see [OpenVINO System Requirements](https://www.intel.com/content/www/us/en/developer/tools/openvino-toolkit/system-requirements.html)
|
||||
OpenVINO is supported on 6th Gen Intel platforms (Skylake) and newer. It will also run on AMD CPUs despite having no official support for it. A supported Intel platform is required to use the `GPU` device with OpenVINO. The `MYRIAD` device may be run on any platform, including Arm devices. For detailed system requirements, see [OpenVINO System Requirements](https://www.intel.com/content/www/us/en/developer/tools/openvino-toolkit/system-requirements.html)
|
||||
|
||||
An OpenVINO model is provided in the container at `/openvino-model/ssdlite_mobilenet_v2.xml` and is used by this detector type by default. The model comes from Intel's Open Model Zoo [SSDLite MobileNet V2](https://github.com/openvinotoolkit/open_model_zoo/tree/master/models/public/ssdlite_mobilenet_v2) and is converted to an FP16 precision IR model. Use the model configuration shown below when using the OpenVINO detector with the default model.
|
||||
|
||||
@@ -119,7 +131,7 @@ model:
|
||||
labelmap_path: /openvino-model/coco_91cl_bkgr.txt
|
||||
```
|
||||
|
||||
This detector also supports some YOLO variants: YOLOX, YOLOv5, and YOLOv8 specifically. Other YOLO variants are not officially supported/tested. Frigate does not come with any yolo models preloaded, so you will need to supply your own models. This detector has been verified to work with the [yolox_tiny](https://github.com/openvinotoolkit/open_model_zoo/tree/master/models/public/yolox-tiny) model from Intel's Open Model Zoo. You can follow [these instructions](https://github.com/openvinotoolkit/open_model_zoo/tree/master/models/public/yolox-tiny#download-a-model-and-convert-it-into-openvino-ir-format) to retrieve the OpenVINO-compatible `yolox_tiny` model. Make sure that the model input dimensions match the `width` and `height` parameters, and `model_type` is set accordingly. See [Full Configuration Reference](/configuration/index.md#full-configuration-reference) for a list of possible `model_type` options. Below is an example of how `yolox_tiny` can be used in Frigate:
|
||||
This detector also supports YOLOX. Other YOLO variants are not officially supported/tested. Frigate does not come with any yolo models preloaded, so you will need to supply your own models. This detector has been verified to work with the [yolox_tiny](https://github.com/openvinotoolkit/open_model_zoo/tree/master/models/public/yolox-tiny) model from Intel's Open Model Zoo. You can follow [these instructions](https://github.com/openvinotoolkit/open_model_zoo/tree/master/models/public/yolox-tiny#download-a-model-and-convert-it-into-openvino-ir-format) to retrieve the OpenVINO-compatible `yolox_tiny` model. Make sure that the model input dimensions match the `width` and `height` parameters, and `model_type` is set accordingly. See [Full Configuration Reference](/configuration/reference.md) for a list of possible `model_type` options. Below is an example of how `yolox_tiny` can be used in Frigate:
|
||||
|
||||
```yaml
|
||||
detectors:
|
||||
@@ -140,7 +152,7 @@ model:
|
||||
|
||||
### Intel NCS2 VPU and Myriad X Setup
|
||||
|
||||
Intel produces a neural net inference accelleration chip called Myriad X. This chip was sold in their Neural Compute Stick 2 (NCS2) which has been discontinued. If intending to use the MYRIAD device for accelleration, additional setup is required to pass through the USB device. The host needs a udev rule installed to handle the NCS2 device.
|
||||
Intel produces a neural net inference acceleration chip called Myriad X. This chip was sold in their Neural Compute Stick 2 (NCS2) which has been discontinued. If intending to use the MYRIAD device for acceleration, additional setup is required to pass through the USB device. The host needs a udev rule installed to handle the NCS2 device.
|
||||
|
||||
```bash
|
||||
sudo usermod -a -G users "$(whoami)"
|
||||
@@ -170,7 +182,7 @@ volumes:
|
||||
|
||||
## NVidia TensorRT Detector
|
||||
|
||||
NVidia GPUs may be used for object detection using the TensorRT libraries. Due to the size of the additional libraries, this detector is only provided in images with the `-tensorrt` tag suffix. This detector is designed to work with Yolo models for object detection.
|
||||
Nvidia GPUs may be used for object detection using the TensorRT libraries. Due to the size of the additional libraries, this detector is only provided in images with the `-tensorrt` tag suffix, e.g. `ghcr.io/blakeblackshear/frigate:stable-tensorrt`. This detector is designed to work with Yolo models for object detection.
|
||||
|
||||
### Minimum Hardware Support
|
||||
|
||||
@@ -192,7 +204,7 @@ There are improved capabilities in newer GPU architectures that TensorRT can ben
|
||||
|
||||
The model used for TensorRT must be preprocessed on the same hardware platform that they will run on. This means that each user must run additional setup to generate a model file for the TensorRT library. A script is included that will build several common models.
|
||||
|
||||
The Frigate image will generate model files during startup if the specified model is not found. Processed models are stored in the `/config/model_cache` folder. Typically the `/config` path is mapped to a directory on the host already and the `model_cache` does not need to be mapped separately unless the user wants to store it in a different location on the host.
|
||||
The Frigate image will generate model files during startup if the specified model is not found. Processed models are stored in the `/config/model_cache` folder. Typically the `/config` path is mapped to a directory on the host already and the `model_cache` does not need to be mapped separately unless the user wants to store it in a different location on the host.
|
||||
|
||||
By default, the `yolov7-320` model will be generated, but this can be overridden by specifying the `YOLO_MODELS` environment variable in Docker. One or more models may be listed in a comma-separated format, and each one will be generated. To select no model generation, set the variable to an empty string, `YOLO_MODELS=""`. Models will only be generated if the corresponding `{model}.trt` file is not present in the `model_cache` folder, so you can force a model to be regenerated by deleting it from your Frigate data folder.
|
||||
|
||||
@@ -239,7 +251,7 @@ frigate:
|
||||
- USE_FP16=false
|
||||
```
|
||||
|
||||
If you have multiple GPUs passed through to Frigate, you can specify which one to use for the model conversion. The conversion script will use the first visible GPU, however in systems with mixed GPU models you may not want to use the default index for object detection. Add the `TRT_MODEL_PREP_DEVICE` environment variable to select a specific GPU.
|
||||
If you have multiple GPUs passed through to Frigate, you can specify which one to use for the model conversion. The conversion script will use the first visible GPU, however in systems with mixed GPU models you may not want to use the default index for object detection. Add the `TRT_MODEL_PREP_DEVICE` environment variable to select a specific GPU.
|
||||
|
||||
```yml
|
||||
frigate:
|
||||
@@ -249,7 +261,7 @@ frigate:
|
||||
|
||||
### Configuration Parameters
|
||||
|
||||
The TensorRT detector can be selected by specifying `tensorrt` as the model type. The GPU will need to be passed through to the docker container using the same methods described in the [Hardware Acceleration](hardware_acceleration.md#nvidia-gpu) section. If you pass through multiple GPUs, you can select which GPU is used for a detector with the `device` configuration parameter. The `device` parameter is an integer value of the GPU index, as shown by `nvidia-smi` within the container.
|
||||
The TensorRT detector can be selected by specifying `tensorrt` as the model type. The GPU will need to be passed through to the docker container using the same methods described in the [Hardware Acceleration](hardware_acceleration.md#nvidia-gpus) section. If you pass through multiple GPUs, you can select which GPU is used for a detector with the `device` configuration parameter. The `device` parameter is an integer value of the GPU index, as shown by `nvidia-smi` within the container.
|
||||
|
||||
The TensorRT detector uses `.trt` model files that are located in `/config/model_cache/tensorrt` by default. These model path and dimensions used will depend on which model you have generated.
|
||||
|
||||
@@ -289,5 +301,110 @@ Replace `<your_codeproject_ai_server_ip>` and `<port>` with the IP address and p
|
||||
|
||||
To verify that the integration is working correctly, start Frigate and observe the logs for any error messages related to CodeProject.AI. Additionally, you can check the Frigate web interface to see if the objects detected by CodeProject.AI are being displayed and tracked properly.
|
||||
|
||||
|
||||
# Community Supported Detectors
|
||||
|
||||
## Rockchip platform
|
||||
|
||||
Hardware accelerated object detection is supported on the following SoCs:
|
||||
|
||||
- RK3562
|
||||
- RK3566
|
||||
- RK3568
|
||||
- RK3576
|
||||
- RK3588
|
||||
|
||||
This implementation uses the [Rockchip's RKNN-Toolkit2](https://github.com/airockchip/rknn-toolkit2/) Currently, only [Yolo-NAS](https://github.com/Deci-AI/super-gradients/blob/master/YOLONAS.md) is supported as object detection model.
|
||||
|
||||
### Prerequisites
|
||||
|
||||
Make sure that you use a linux distribution that comes with the rockchip BSP kernel 5.10 or 6.1 and rknpu driver. To check, enter the following commands:
|
||||
|
||||
```
|
||||
$ uname -r
|
||||
5.10.xxx-rockchip # or 6.1.xxx; the -rockchip suffix is important
|
||||
$ ls /dev/dri
|
||||
by-path card0 card1 renderD128 renderD129 # should list renderD129
|
||||
$ sudo cat /sys/kernel/debug/rknpu/version
|
||||
RKNPU driver: v0.9.2 # or later version
|
||||
```
|
||||
|
||||
I recommend [Joshua Riek's Ubuntu for Rockchip](https://github.com/Joshua-Riek/ubuntu-rockchip), if your board is supported.
|
||||
|
||||
### Setup
|
||||
|
||||
Follow Frigate's default installation instructions, but use a docker image with `-rk` suffix for example `ghcr.io/blakeblackshear/frigate:stable-rk`.
|
||||
|
||||
Next, you need to grant docker permissions to access your hardware:
|
||||
|
||||
- During the configuration process, you should run docker in privileged mode to avoid any errors due to insufficient permissions. To do so, add `privileged: true` to your `docker-compose.yml` file or the `--privileged` flag to your docker run command.
|
||||
- After everything works, you should only grant necessary permissions to increase security. Add the lines below to your `docker-compose.yml` file or the following options to your docker run command: `--security-opt systempaths=unconfined --security-opt apparmor=unconfined --device /dev/dri:/dev/dri`:
|
||||
|
||||
```yaml
|
||||
security_opt:
|
||||
- apparmor=unconfined
|
||||
- systempaths=unconfined
|
||||
devices:
|
||||
- /dev/dri:/dev/dri
|
||||
```
|
||||
|
||||
### Configuration
|
||||
|
||||
This `config.yml` shows all relevant options to configure the detector and explains them. All values shown are the default values (except for two). Lines that are required at least to use the detector are labeled as required, all other lines are optional.
|
||||
|
||||
```yaml
|
||||
detectors: # required
|
||||
rknn: # required
|
||||
type: rknn # required
|
||||
# number of NPU cores to use
|
||||
# 0 means choose automatically
|
||||
# increase for better performance if you have a multicore NPU e.g. set to 3 on rk3588
|
||||
num_cores: 0
|
||||
|
||||
model: # required
|
||||
# name of model (will be automatically downloaded) or path to your own .rknn model file
|
||||
# possible values are:
|
||||
# - deci-fp16-yolonas_s
|
||||
# - deci-fp16-yolonas_m
|
||||
# - deci-fp16-yolonas_l
|
||||
# - /config/model_cache/your_custom_model.rknn
|
||||
path: deci-fp16-yolonas_s
|
||||
# width and height of detection frames
|
||||
width: 320
|
||||
height: 320
|
||||
# pixel format of detection frame
|
||||
# default value is rgb but yolo models usually use bgr format
|
||||
input_pixel_format: bgr # required
|
||||
# shape of detection frame
|
||||
input_tensor: nhwc
|
||||
```
|
||||
|
||||
### Choosing a model
|
||||
|
||||
:::warning
|
||||
|
||||
yolo-nas models use weights from DeciAI. These weights are subject to their license and can't be used commercially. For more information, see: https://docs.deci.ai/super-gradients/latest/LICENSE.YOLONAS.html
|
||||
|
||||
:::
|
||||
|
||||
The inference time was determined on a rk3588 with 3 NPU cores.
|
||||
|
||||
| Model | Size in mb | Inference time in ms |
|
||||
| ------------------- | ---------- | -------------------- |
|
||||
| deci-fp16-yolonas_s | 24 | 25 |
|
||||
| deci-fp16-yolonas_m | 62 | 35 |
|
||||
| deci-fp16-yolonas_l | 81 | 45 |
|
||||
|
||||
:::tip
|
||||
|
||||
You can get the load of your NPU with the following command:
|
||||
|
||||
```bash
|
||||
$ cat /sys/kernel/debug/rknpu/load
|
||||
>> NPU load: Core0: 0%, Core1: 0%, Core2: 0%,
|
||||
```
|
||||
|
||||
:::
|
||||
|
||||
- By default the rknn detector uses the yolonas_s model (`model: path: default-fp16-yolonas_s`). This model comes with the image, so no further steps than those mentioned above are necessary and no download happens.
|
||||
- The other choices are automatically downloaded and stored in the folder `config/model_cache/rknn_cache`. After upgrading Frigate, you should remove older models to free up space.
|
||||
- Finally, you can also provide your own `.rknn` model. You should not save your own models in the `rknn_cache` folder, store them directly in the `model_cache` folder or another subfolder. To convert a model to `.rknn` format see the `rknn-toolkit2` (requires a x86 machine). Note, that there is only post-processing for the supported models.
|
||||
|
||||
@@ -1,8 +1,10 @@
|
||||
---
|
||||
id: false_positives
|
||||
title: Reducing false positives
|
||||
id: object_filters
|
||||
title: Filters
|
||||
---
|
||||
|
||||
There are several types of object filters that can be used to reduce false positive rates.
|
||||
|
||||
## Object Scores
|
||||
|
||||
For object filters in your configuration, any single detection below `min_score` will be ignored as a false positive. `threshold` is based on the median of the history of scores (padded to 3 values) for a tracked object. Consider the following frames when `min_score` is set to 0.6 and threshold is set to 0.85:
|
||||
@@ -18,6 +20,8 @@ For object filters in your configuration, any single detection below `min_score`
|
||||
|
||||
In frame 2, the score is below the `min_score` value, so Frigate ignores it and it becomes a 0.0. The computed score is the median of the score history (padding to at least 3 values), and only when that computed score crosses the `threshold` is the object marked as a true positive. That happens in frame 4 in the example.
|
||||
|
||||
show image of snapshot vs event with differing scores
|
||||
|
||||
### Minimum Score
|
||||
|
||||
Any detection below `min_score` will be immediately thrown out and never tracked because it is considered a false positive. If `min_score` is too low then false positives may be detected and tracked which can confuse the object tracker and may lead to wasted resources. If `min_score` is too high then lower scoring true positives like objects that are further away or partially occluded may be thrown out which can also confuse the tracker and cause valid events to be lost or disjointed.
|
||||
@@ -36,7 +40,13 @@ False positives can also be reduced by filtering a detection based on its shape.
|
||||
|
||||
### Object Proportions
|
||||
|
||||
`min_ratio` and `max_ratio` filter on the ratio of width / height of an objects bounding box and can be used to reduce false positives. For example if a false positive is detected as very tall for a dog which is often wider, a `min_ratio` filter can be used to filter out these false positives.
|
||||
`min_ratio` and `max_ratio` values are compared against a given detected object's width/height ratio (in pixels). If the ratio is outside this range, the object will be ignored as a false positive. This allows objects that are proportionally too short-and-wide (higher ratio) or too tall-and-narrow (smaller ratio) to be ignored.
|
||||
|
||||
:::info
|
||||
|
||||
Conceptually, a ratio of 1 is a square, 0.5 is a "tall skinny" box, and 2 is a "wide flat" box. If `min_ratio` is 1.0, any object that is taller than it is wide will be ignored. Similarly, if `max_ratio` is 1.0, then any object that is wider than it is tall will be ignored.
|
||||
|
||||
:::
|
||||
|
||||
## Other Tools
|
||||
|
||||
@@ -1,15 +1,16 @@
|
||||
---
|
||||
id: objects
|
||||
title: Objects
|
||||
title: Available Objects
|
||||
---
|
||||
|
||||
import labels from "../../../labelmap.txt";
|
||||
|
||||
Frigate includes the object models listed below from the Google Coral test data.
|
||||
|
||||
Please note:
|
||||
- `car` is listed twice because `truck` has been renamed to `car` by default. These object types are frequently confused.
|
||||
- `person` is the only tracked object by default. See the [full configuration reference](index.md#full-configuration-reference) for an example of expanding the list of tracked objects.
|
||||
Please note:
|
||||
|
||||
- `car` is listed twice because `truck` has been renamed to `car` by default. These object types are frequently confused.
|
||||
- `person` is the only tracked object by default. See the [full configuration reference](reference.md) for an example of expanding the list of tracked objects.
|
||||
|
||||
<ul>
|
||||
{labels.split("\n").map((label) => (
|
||||
|
||||
@@ -3,17 +3,90 @@ id: record
|
||||
title: Recording
|
||||
---
|
||||
|
||||
Recordings can be enabled and are stored at `/media/frigate/recordings`. The folder structure for the recordings is `YYYY-MM-DD/HH/<camera_name>/MM.SS.mp4`. These recordings are written directly from your camera stream without re-encoding. Each camera supports a configurable retention policy in the config. Frigate chooses the largest matching retention value between the recording retention and the event retention when determining if a recording should be removed.
|
||||
Recordings can be enabled and are stored at `/media/frigate/recordings`. The folder structure for the recordings is `YYYY-MM-DD/HH/<camera_name>/MM.SS.mp4` in **UTC time**. These recordings are written directly from your camera stream without re-encoding. Each camera supports a configurable retention policy in the config. Frigate chooses the largest matching retention value between the recording retention and the event retention when determining if a recording should be removed.
|
||||
|
||||
New recording segments are written from the camera stream to cache, they are only moved to disk if they match the setup recording retention policy.
|
||||
|
||||
H265 recordings can be viewed in Chrome 108+, Edge and Safari only. All other browsers require recordings to be encoded with H264.
|
||||
|
||||
## Common recording configurations
|
||||
|
||||
### Most conservative: Ensure all video is saved
|
||||
|
||||
For users deploying Frigate in environments where it is important to have contiguous video stored even if there was no detectable motion, the following config will store all video for 3 days. After 3 days, only video containing motion and overlapping with events will be retained until 30 days have passed.
|
||||
|
||||
```yaml
|
||||
record:
|
||||
enabled: True
|
||||
retain:
|
||||
days: 3
|
||||
mode: all
|
||||
events:
|
||||
retain:
|
||||
default: 30
|
||||
mode: motion
|
||||
```
|
||||
|
||||
### Reduced storage: Only saving video when motion is detected
|
||||
|
||||
In order to reduce storage requirements, you can adjust your config to only retain video where motion was detected.
|
||||
|
||||
```yaml
|
||||
record:
|
||||
enabled: True
|
||||
retain:
|
||||
days: 3
|
||||
mode: motion
|
||||
events:
|
||||
retain:
|
||||
default: 30
|
||||
mode: motion
|
||||
```
|
||||
|
||||
### Minimum: Events only
|
||||
|
||||
If you only want to retain video that occurs during an event, this config will discard video unless an event is ongoing.
|
||||
|
||||
```yaml
|
||||
record:
|
||||
enabled: True
|
||||
retain:
|
||||
days: 0
|
||||
mode: all
|
||||
events:
|
||||
retain:
|
||||
default: 30
|
||||
mode: motion
|
||||
```
|
||||
|
||||
## Will Frigate delete old recordings if my storage runs out?
|
||||
|
||||
As of Frigate 0.12 if there is less than an hour left of storage, the oldest 2 hours of recordings will be deleted.
|
||||
|
||||
## What if I don't want 24/7 recordings?
|
||||
## Configuring Recording Retention
|
||||
|
||||
Frigate supports both continuous and event based recordings with separate retention modes and retention periods.
|
||||
|
||||
:::tip
|
||||
|
||||
Retention configs support decimals meaning they can be configured to retain `0.5` days, for example.
|
||||
|
||||
:::
|
||||
|
||||
### Continuous Recording
|
||||
|
||||
The number of days to retain continuous recordings can be set via the following config where X is a number, by default continuous recording is disabled.
|
||||
|
||||
```yaml
|
||||
record:
|
||||
enabled: True
|
||||
retain:
|
||||
days: 1 # <- number of days to keep continuous recordings
|
||||
```
|
||||
|
||||
Continuous recording supports different retention modes [which are described below](#what-do-the-different-retain-modes-mean)
|
||||
|
||||
### Event Recording
|
||||
|
||||
If you only used clips in previous versions with recordings disabled, you can use the following config to get the same behavior. This is also the default behavior when recordings are enabled.
|
||||
|
||||
@@ -22,34 +95,31 @@ record:
|
||||
enabled: True
|
||||
events:
|
||||
retain:
|
||||
default: 10
|
||||
default: 10 # <- number of days to keep event recordings
|
||||
```
|
||||
|
||||
This configuration will retain recording segments that overlap with events and have active tracked objects for 10 days. Because multiple events can reference the same recording segments, this avoids storing duplicate footage for overlapping events and reduces overall storage needs.
|
||||
|
||||
When `retain -> days` is set to `0`, segments will be deleted from the cache if no events are in progress.
|
||||
|
||||
## Can I have "24/7" recordings, but only at certain times?
|
||||
|
||||
Using Frigate UI, HomeAssistant, or MQTT, cameras can be automated to only record in certain situations or at certain times.
|
||||
|
||||
**WARNING**: Recordings still must be enabled in the config. If a camera has recordings disabled in the config, enabling via the methods listed above will have no effect.
|
||||
|
||||
## What do the different retain modes mean?
|
||||
|
||||
Frigate saves from the stream with the `record` role in 10 second segments. These options determine which recording segments are kept for 24/7 recording (but can also affect events).
|
||||
Frigate saves from the stream with the `record` role in 10 second segments. These options determine which recording segments are kept for continuous recording (but can also affect events).
|
||||
|
||||
Let's say you have Frigate configured so that your doorbell camera would retain the last **2** days of continuous recording.
|
||||
|
||||
Let's say you have Frigate configured so that your doorbell camera would retain the last **2** days of 24/7 recording.
|
||||
- With the `all` option all 48 hours of those two days would be kept and viewable.
|
||||
- With the `motion` option the only parts of those 48 hours would be segments that Frigate detected motion. This is the middle ground option that won't keep all 48 hours, but will likely keep all segments of interest along with the potential for some extra segments.
|
||||
- With the `active_objects` option the only segments that would be kept are those where there was a true positive object that was not considered stationary.
|
||||
|
||||
The same options are available with events. Let's consider a scenario where you drive up and park in your driveway, go inside, then come back out 4 hours later.
|
||||
|
||||
- With the `all` option all segments for the duration of the event would be saved for the event. This event would have 4 hours of footage.
|
||||
- With the `motion` option all segments for the duration of the event with motion would be saved. This means any segment where a car drove by in the street, person walked by, lighting changed, etc. would be saved.
|
||||
- With the `active_objects` it would only keep segments where the object was active. In this case the only segments that would be saved would be the ones where the car was driving up, you going inside, you coming outside, and the car driving away. Essentially reducing the 4 hours to a minute or two of event footage.
|
||||
|
||||
A configuration example of the above retain modes where all `motion` segments are stored for 7 days and `active objects` are stored for 14 days would be as follows:
|
||||
|
||||
```yaml
|
||||
record:
|
||||
enabled: True
|
||||
@@ -61,11 +131,13 @@ record:
|
||||
default: 14
|
||||
mode: active_objects
|
||||
```
|
||||
|
||||
The above configuration example can be added globally or on a per camera basis.
|
||||
|
||||
### Object Specific Retention
|
||||
|
||||
You can also set specific retention length for an object type. The below configuration example builds on from above but also specifies that recordings of dogs only need to be kept for 2 days and recordings of cars should be kept for 7 days.
|
||||
|
||||
```yaml
|
||||
record:
|
||||
enabled: True
|
||||
@@ -81,17 +153,40 @@ record:
|
||||
car: 7
|
||||
```
|
||||
|
||||
## Can I have "continuous" recordings, but only at certain times?
|
||||
|
||||
Using Frigate UI, HomeAssistant, or MQTT, cameras can be automated to only record in certain situations or at certain times.
|
||||
|
||||
## How do I export recordings?
|
||||
|
||||
The export page in the Frigate WebUI allows for exporting real time clips with a designated start and stop time as well as exporting a timelapse for a designated start and stop time. These exports can take a while so it is important to leave the file until it is no longer in progress.
|
||||
The export page in the Frigate WebUI allows for exporting real time clips with a designated start and stop time as well as exporting a time-lapse for a designated start and stop time. These exports can take a while so it is important to leave the file until it is no longer in progress.
|
||||
|
||||
## Syncing Recordings With Disk
|
||||
### Time-lapse export
|
||||
|
||||
In some cases the recordings files may be deleted but Frigate will not know this has happened. Sync on startup can be enabled which will tell Frigate to check the file system and delete any db entries for files which don't exist.
|
||||
When exporting a time-lapse the default speed-up is 25x with 30 FPS. This means that every 25 seconds of (real-time) recording is condensed into 1 second of time-lapse video (always without audio) with a smoothness of 30 FPS.
|
||||
To configure the speed-up factor, the frame rate and further custom settings, the configuration parameter `timelapse_args` can be used. The below configuration example would change the time-lapse speed to 60x (for fitting 1 hour of recording into 1 minute of time-lapse) with 25 FPS:
|
||||
|
||||
```yaml
|
||||
record:
|
||||
sync_on_startup: True
|
||||
enabled: True
|
||||
export:
|
||||
timelapse_args: "-vf setpts=PTS/60 -r 25"
|
||||
```
|
||||
|
||||
:::tip
|
||||
|
||||
When using `hwaccel_args` globally hardware encoding is used for time lapse generation. The encoder determines its own behavior so the resulting file size may be undesirably large.
|
||||
To reduce the output file size the ffmpeg parameter `-qp n` can be utilized (where `n` stands for the value of the quantisation parameter). The value can be adjusted to get an acceptable tradeoff between quality and file size for the given scenario.
|
||||
|
||||
:::
|
||||
|
||||
## Syncing Recordings With Disk
|
||||
|
||||
In some cases the recordings files may be deleted but Frigate will not know this has happened. Recordings sync can be enabled which will tell Frigate to check the file system and delete any db entries for files which don't exist.
|
||||
|
||||
```yaml
|
||||
record:
|
||||
sync_recordings: True
|
||||
```
|
||||
|
||||
:::warning
|
||||
|
||||
713
docs/docs/configuration/reference.md
Normal file
713
docs/docs/configuration/reference.md
Normal file
@@ -0,0 +1,713 @@
|
||||
---
|
||||
id: reference
|
||||
title: Full Reference Config
|
||||
---
|
||||
|
||||
### Full configuration reference:
|
||||
|
||||
:::warning
|
||||
|
||||
It is not recommended to copy this full configuration file. Only specify values that are different from the defaults. Configuration options and default values may change in future versions.
|
||||
|
||||
:::
|
||||
|
||||
```yaml
|
||||
mqtt:
|
||||
# Optional: Enable mqtt server (default: shown below)
|
||||
enabled: True
|
||||
# Required: host name
|
||||
host: mqtt.server.com
|
||||
# Optional: port (default: shown below)
|
||||
port: 1883
|
||||
# Optional: topic prefix (default: shown below)
|
||||
# NOTE: must be unique if you are running multiple instances
|
||||
topic_prefix: frigate
|
||||
# Optional: client id (default: shown below)
|
||||
# NOTE: must be unique if you are running multiple instances
|
||||
client_id: frigate
|
||||
# Optional: user
|
||||
# NOTE: MQTT user can be specified with an environment variable or docker secrets that must begin with 'FRIGATE_'.
|
||||
# e.g. user: '{FRIGATE_MQTT_USER}'
|
||||
user: mqtt_user
|
||||
# Optional: password
|
||||
# NOTE: MQTT password can be specified with an environment variable or docker secrets that must begin with 'FRIGATE_'.
|
||||
# e.g. password: '{FRIGATE_MQTT_PASSWORD}'
|
||||
password: password
|
||||
# Optional: tls_ca_certs for enabling TLS using self-signed certs (default: None)
|
||||
tls_ca_certs: /path/to/ca.crt
|
||||
# Optional: tls_client_cert and tls_client key in order to use self-signed client
|
||||
# certificates (default: None)
|
||||
# NOTE: certificate must not be password-protected
|
||||
# do not set user and password when using a client certificate
|
||||
tls_client_cert: /path/to/client.crt
|
||||
tls_client_key: /path/to/client.key
|
||||
# Optional: tls_insecure (true/false) for enabling TLS verification of
|
||||
# the server hostname in the server certificate (default: None)
|
||||
tls_insecure: false
|
||||
# Optional: interval in seconds for publishing stats (default: shown below)
|
||||
stats_interval: 60
|
||||
|
||||
# Optional: Detectors configuration. Defaults to a single CPU detector
|
||||
detectors:
|
||||
# Required: name of the detector
|
||||
detector_name:
|
||||
# Required: type of the detector
|
||||
# Frigate provided types include 'cpu', 'edgetpu', 'openvino' and 'tensorrt' (default: shown below)
|
||||
# Additional detector types can also be plugged in.
|
||||
# Detectors may require additional configuration.
|
||||
# Refer to the Detectors configuration page for more information.
|
||||
type: cpu
|
||||
|
||||
# Optional: Database configuration
|
||||
database:
|
||||
# The path to store the SQLite DB (default: shown below)
|
||||
path: /config/frigate.db
|
||||
|
||||
# Optional: Authentication configuration
|
||||
auth:
|
||||
# Optional: Authentication mode (default: shown below)
|
||||
# Valid values are: native, proxy
|
||||
mode: native
|
||||
# Optional: Reset the admin user password on startup (default: shown below)
|
||||
# New password is printed in the logs
|
||||
reset_admin_password: False
|
||||
# Optional: Cookie to store the JWT token for native auth (default: shown below)
|
||||
cookie_name: frigate_token
|
||||
# Optional: Set secure flag on cookie. (default: shown below)
|
||||
# NOTE: This should be set to True if you are using TLS
|
||||
cookie_secure: False
|
||||
# Optional: Session length in seconds (default: shown below)
|
||||
session_length: 86400 # 24 hours
|
||||
# Optional: Refresh time in seconds (default: shown below)
|
||||
# When the session is going to expire in less time than this setting,
|
||||
# it will be refreshed back to the session_length.
|
||||
refresh_time: 43200 # 12 hours
|
||||
# Optional: Mapping for headers from upstream proxies. Only used in proxy auth mode.
|
||||
# NOTE: Many authentication proxies pass a header downstream with the authenticated
|
||||
# user name. Not all values are supported. It must be a whitelisted header.
|
||||
# See the docs for more info.
|
||||
header_map:
|
||||
user: x-forwarded-user
|
||||
# Optional: Rate limiting for login failures to help prevent brute force
|
||||
# login attacks (default: shown below)
|
||||
# See the docs for more information on valid values
|
||||
failed_login_rate_limit: None
|
||||
# Optional: Trusted proxies for determining IP address to rate limit
|
||||
# NOTE: This is only used for rate limiting login attempts and does not bypass
|
||||
# authentication in any way
|
||||
trusted_proxies: []
|
||||
# Optional: Url for logging out a user. This only needs to be set if you are using
|
||||
# proxy mode.
|
||||
logout_url: /api/logout
|
||||
# Optional: Number of hashing iterations for user passwords
|
||||
# As of Feb 2023, OWASP recommends 600000 iterations for PBKDF2-SHA256
|
||||
# NOTE: changing this value will not automatically update password hashes, you
|
||||
# will need to change each user password for it to apply
|
||||
hash_iterations: 600000
|
||||
|
||||
# Optional: model modifications
|
||||
model:
|
||||
# Optional: path to the model (default: automatic based on detector)
|
||||
path: /edgetpu_model.tflite
|
||||
# Optional: path to the labelmap (default: shown below)
|
||||
labelmap_path: /labelmap.txt
|
||||
# Required: Object detection model input width (default: shown below)
|
||||
width: 320
|
||||
# Required: Object detection model input height (default: shown below)
|
||||
height: 320
|
||||
# Optional: Object detection model input colorspace
|
||||
# Valid values are rgb, bgr, or yuv. (default: shown below)
|
||||
input_pixel_format: rgb
|
||||
# Optional: Object detection model input tensor format
|
||||
# Valid values are nhwc or nchw (default: shown below)
|
||||
input_tensor: nhwc
|
||||
# Optional: Object detection model type, currently only used with the OpenVINO detector
|
||||
# Valid values are ssd, yolox, yolonas (default: shown below)
|
||||
model_type: ssd
|
||||
# Optional: Label name modifications. These are merged into the standard labelmap.
|
||||
labelmap:
|
||||
2: vehicle
|
||||
|
||||
# Optional: Audio Events Configuration
|
||||
# NOTE: Can be overridden at the camera level
|
||||
audio:
|
||||
# Optional: Enable audio events (default: shown below)
|
||||
enabled: False
|
||||
# Optional: Configure the amount of seconds without detected audio to end the event (default: shown below)
|
||||
max_not_heard: 30
|
||||
# Optional: Configure the min rms volume required to run audio detection (default: shown below)
|
||||
# As a rule of thumb:
|
||||
# - 200 - high sensitivity
|
||||
# - 500 - medium sensitivity
|
||||
# - 1000 - low sensitivity
|
||||
min_volume: 500
|
||||
# Optional: Types of audio to listen for (default: shown below)
|
||||
listen:
|
||||
- bark
|
||||
- fire_alarm
|
||||
- scream
|
||||
- speech
|
||||
- yell
|
||||
# Optional: Filters to configure detection.
|
||||
filters:
|
||||
# Label that matches label in listen config.
|
||||
speech:
|
||||
# Minimum score that triggers an audio event (default: shown below)
|
||||
threshold: 0.8
|
||||
|
||||
# Optional: logger verbosity settings
|
||||
logger:
|
||||
# Optional: Default log verbosity (default: shown below)
|
||||
default: info
|
||||
# Optional: Component specific logger overrides
|
||||
logs:
|
||||
frigate.event: debug
|
||||
|
||||
# Optional: set environment variables
|
||||
environment_vars:
|
||||
EXAMPLE_VAR: value
|
||||
|
||||
# Optional: birdseye configuration
|
||||
# NOTE: Can (enabled, mode) be overridden at the camera level
|
||||
birdseye:
|
||||
# Optional: Enable birdseye view (default: shown below)
|
||||
enabled: True
|
||||
# Optional: Restream birdseye via RTSP (default: shown below)
|
||||
# NOTE: Enabling this will set birdseye to run 24/7 which may increase CPU usage somewhat.
|
||||
restream: False
|
||||
# Optional: Width of the output resolution (default: shown below)
|
||||
width: 1280
|
||||
# Optional: Height of the output resolution (default: shown below)
|
||||
height: 720
|
||||
# Optional: Encoding quality of the mpeg1 feed (default: shown below)
|
||||
# 1 is the highest quality, and 31 is the lowest. Lower quality feeds utilize less CPU resources.
|
||||
quality: 8
|
||||
# Optional: Mode of the view. Available options are: objects, motion, and continuous
|
||||
# objects - cameras are included if they have had a tracked object within the last 30 seconds
|
||||
# motion - cameras are included if motion was detected in the last 30 seconds
|
||||
# continuous - all cameras are included always
|
||||
mode: objects
|
||||
# Optional: Threshold for camera activity to stop showing camera (default: shown below)
|
||||
inactivity_threshold: 30
|
||||
# Optional: Configure the birdseye layout
|
||||
layout:
|
||||
# Optional: Scaling factor for the layout calculator (default: shown below)
|
||||
scaling_factor: 2.0
|
||||
# Optional: Maximum number of cameras to show at one time, showing the most recent (default: show all cameras)
|
||||
max_cameras: 1
|
||||
|
||||
# Optional: ffmpeg configuration
|
||||
# More information about presets at https://docs.frigate.video/configuration/ffmpeg_presets
|
||||
ffmpeg:
|
||||
# Optional: global ffmpeg args (default: shown below)
|
||||
global_args: -hide_banner -loglevel warning -threads 2
|
||||
# Optional: global hwaccel args (default: auto detect)
|
||||
# NOTE: See hardware acceleration docs for your specific device
|
||||
hwaccel_args: "auto"
|
||||
# Optional: global input args (default: shown below)
|
||||
input_args: preset-rtsp-generic
|
||||
# Optional: global output args
|
||||
output_args:
|
||||
# Optional: output args for detect streams (default: shown below)
|
||||
detect: -threads 2 -f rawvideo -pix_fmt yuv420p
|
||||
# Optional: output args for record streams (default: shown below)
|
||||
record: preset-record-generic
|
||||
# Optional: Time in seconds to wait before ffmpeg retries connecting to the camera. (default: shown below)
|
||||
# If set too low, frigate will retry a connection to the camera's stream too frequently, using up the limited streams some cameras can allow at once
|
||||
# If set too high, then if a ffmpeg crash or camera stream timeout occurs, you could potentially lose up to a maximum of retry_interval second(s) of footage
|
||||
# NOTE: this can be a useful setting for Wireless / Battery cameras to reduce how much footage is potentially lost during a connection timeout.
|
||||
retry_interval: 10
|
||||
|
||||
# Optional: Detect configuration
|
||||
# NOTE: Can be overridden at the camera level
|
||||
detect:
|
||||
# Optional: width of the frame for the input with the detect role (default: use native stream resolution)
|
||||
width: 1280
|
||||
# Optional: height of the frame for the input with the detect role (default: use native stream resolution)
|
||||
height: 720
|
||||
# Optional: desired fps for your camera for the input with the detect role (default: shown below)
|
||||
# NOTE: Recommended value of 5. Ideally, try and reduce your FPS on the camera.
|
||||
fps: 5
|
||||
# Optional: enables detection for the camera (default: True)
|
||||
enabled: True
|
||||
# Optional: Number of consecutive detection hits required for an object to be initialized in the tracker. (default: 1/2 the frame rate)
|
||||
min_initialized: 2
|
||||
# Optional: Number of frames without a detection before Frigate considers an object to be gone. (default: 5x the frame rate)
|
||||
max_disappeared: 25
|
||||
# Optional: Configuration for stationary object tracking
|
||||
stationary:
|
||||
# Optional: Frequency for confirming stationary objects (default: same as threshold)
|
||||
# When set to 1, object detection will run to confirm the object still exists on every frame.
|
||||
# If set to 10, object detection will run to confirm the object still exists on every 10th frame.
|
||||
interval: 50
|
||||
# Optional: Number of frames without a position change for an object to be considered stationary (default: 10x the frame rate or 10s)
|
||||
threshold: 50
|
||||
# Optional: Define a maximum number of frames for tracking a stationary object (default: not set, track forever)
|
||||
# This can help with false positives for objects that should only be stationary for a limited amount of time.
|
||||
# It can also be used to disable stationary object tracking. For example, you may want to set a value for person, but leave
|
||||
# car at the default.
|
||||
# WARNING: Setting these values overrides default behavior and disables stationary object tracking.
|
||||
# There are very few situations where you would want it disabled. It is NOT recommended to
|
||||
# copy these values from the example config into your config unless you know they are needed.
|
||||
max_frames:
|
||||
# Optional: Default for all object types (default: not set, track forever)
|
||||
default: 3000
|
||||
# Optional: Object specific values
|
||||
objects:
|
||||
person: 1000
|
||||
# Optional: Milliseconds to offset detect annotations by (default: shown below).
|
||||
# There can often be latency between a recording and the detect process,
|
||||
# especially when using separate streams for detect and record.
|
||||
# Use this setting to make the timeline bounding boxes more closely align
|
||||
# with the recording. The value can be positive or negative.
|
||||
# TIP: Imagine there is an event clip with a person walking from left to right.
|
||||
# If the event timeline bounding box is consistently to the left of the person
|
||||
# then the value should be decreased. Similarly, if a person is walking from
|
||||
# left to right and the bounding box is consistently ahead of the person
|
||||
# then the value should be increased.
|
||||
# TIP: This offset is dynamic so you can change the value and it will update existing
|
||||
# events, this makes it easy to tune.
|
||||
# WARNING: Fast moving objects will likely not have the bounding box align.
|
||||
annotation_offset: 0
|
||||
|
||||
# Optional: Object configuration
|
||||
# NOTE: Can be overridden at the camera level
|
||||
objects:
|
||||
# Optional: list of objects to track from labelmap.txt (default: shown below)
|
||||
track:
|
||||
- person
|
||||
# Optional: mask to prevent all object types from being detected in certain areas (default: no mask)
|
||||
# Checks based on the bottom center of the bounding box of the object.
|
||||
# NOTE: This mask is COMBINED with the object type specific mask below
|
||||
mask: 0.000,0.000,0.781,0.000,0.781,0.278,0.000,0.278
|
||||
# Optional: filters to reduce false positives for specific object types
|
||||
filters:
|
||||
person:
|
||||
# Optional: minimum width*height of the bounding box for the detected object (default: 0)
|
||||
min_area: 5000
|
||||
# Optional: maximum width*height of the bounding box for the detected object (default: 24000000)
|
||||
max_area: 100000
|
||||
# Optional: minimum width/height of the bounding box for the detected object (default: 0)
|
||||
min_ratio: 0.5
|
||||
# Optional: maximum width/height of the bounding box for the detected object (default: 24000000)
|
||||
max_ratio: 2.0
|
||||
# Optional: minimum score for the object to initiate tracking (default: shown below)
|
||||
min_score: 0.5
|
||||
# Optional: minimum decimal percentage for tracked object's computed score to be considered a true positive (default: shown below)
|
||||
threshold: 0.7
|
||||
# Optional: mask to prevent this object type from being detected in certain areas (default: no mask)
|
||||
# Checks based on the bottom center of the bounding box of the object
|
||||
mask: 0.000,0.000,0.781,0.000,0.781,0.278,0.000,0.278
|
||||
|
||||
# Optional: Review configuration
|
||||
# NOTE: Can be overridden at the camera level
|
||||
review:
|
||||
# Optional: alerts configuration
|
||||
alerts:
|
||||
# Optional: labels that qualify as an alert (default: shown below)
|
||||
labels:
|
||||
- car
|
||||
- person
|
||||
# Optional: required zones for an object to be marked as an alert (default: none)
|
||||
required_zones:
|
||||
- driveway
|
||||
# Optional: detections configuration
|
||||
detections:
|
||||
# Optional: labels that qualify as a detection (default: all labels that are tracked / listened to)
|
||||
labels:
|
||||
- car
|
||||
- person
|
||||
# Optional: required zones for an object to be marked as a detection (default: none)
|
||||
required_zones:
|
||||
- driveway
|
||||
|
||||
# Optional: Motion configuration
|
||||
# NOTE: Can be overridden at the camera level
|
||||
motion:
|
||||
# Optional: The threshold passed to cv2.threshold to determine if a pixel is different enough to be counted as motion. (default: shown below)
|
||||
# Increasing this value will make motion detection less sensitive and decreasing it will make motion detection more sensitive.
|
||||
# The value should be between 1 and 255.
|
||||
threshold: 30
|
||||
# Optional: The percentage of the image used to detect lightning or other substantial changes where motion detection
|
||||
# needs to recalibrate. (default: shown below)
|
||||
# Increasing this value will make motion detection more likely to consider lightning or ir mode changes as valid motion.
|
||||
# Decreasing this value will make motion detection more likely to ignore large amounts of motion such as a person approaching
|
||||
# a doorbell camera.
|
||||
lightning_threshold: 0.8
|
||||
# Optional: Minimum size in pixels in the resized motion image that counts as motion (default: shown below)
|
||||
# Increasing this value will prevent smaller areas of motion from being detected. Decreasing will
|
||||
# make motion detection more sensitive to smaller moving objects.
|
||||
# As a rule of thumb:
|
||||
# - 10 - high sensitivity
|
||||
# - 30 - medium sensitivity
|
||||
# - 50 - low sensitivity
|
||||
contour_area: 10
|
||||
# Optional: Alpha value passed to cv2.accumulateWeighted when averaging frames to determine the background (default: shown below)
|
||||
# Higher values mean the current frame impacts the average a lot, and a new object will be averaged into the background faster.
|
||||
# Low values will cause things like moving shadows to be detected as motion for longer.
|
||||
# https://www.geeksforgeeks.org/background-subtraction-in-an-image-using-concept-of-running-average/
|
||||
frame_alpha: 0.01
|
||||
# Optional: Height of the resized motion frame (default: 100)
|
||||
# Higher values will result in more granular motion detection at the expense of higher CPU usage.
|
||||
# Lower values result in less CPU, but small changes may not register as motion.
|
||||
frame_height: 100
|
||||
# Optional: motion mask
|
||||
# NOTE: see docs for more detailed info on creating masks
|
||||
mask: 0.000,0.469,1.000,0.469,1.000,1.000,0.000,1.000
|
||||
# Optional: improve contrast (default: shown below)
|
||||
# Enables dynamic contrast improvement. This should help improve night detections at the cost of making motion detection more sensitive
|
||||
# for daytime.
|
||||
improve_contrast: True
|
||||
# Optional: Delay when updating camera motion through MQTT from ON -> OFF (default: shown below).
|
||||
mqtt_off_delay: 30
|
||||
|
||||
# Optional: Record configuration
|
||||
# NOTE: Can be overridden at the camera level
|
||||
record:
|
||||
# Optional: Enable recording (default: shown below)
|
||||
# WARNING: If recording is disabled in the config, turning it on via
|
||||
# the UI or MQTT later will have no effect.
|
||||
enabled: False
|
||||
# Optional: Number of minutes to wait between cleanup runs (default: shown below)
|
||||
# This can be used to reduce the frequency of deleting recording segments from disk if you want to minimize i/o
|
||||
expire_interval: 60
|
||||
# Optional: Sync recordings with disk on startup and once a day (default: shown below).
|
||||
sync_recordings: False
|
||||
# Optional: Retention settings for recording
|
||||
retain:
|
||||
# Optional: Number of days to retain recordings regardless of events (default: shown below)
|
||||
# NOTE: This should be set to 0 and retention should be defined in events section below
|
||||
# if you only want to retain recordings of events.
|
||||
days: 0
|
||||
# Optional: Mode for retention. Available options are: all, motion, and active_objects
|
||||
# all - save all recording segments regardless of activity
|
||||
# motion - save all recordings segments with any detected motion
|
||||
# active_objects - save all recording segments with active/moving objects
|
||||
# NOTE: this mode only applies when the days setting above is greater than 0
|
||||
mode: all
|
||||
# Optional: Recording Export Settings
|
||||
export:
|
||||
# Optional: Timelapse Output Args (default: shown below).
|
||||
# NOTE: The default args are set to fit 24 hours of recording into 1 hour playback.
|
||||
# See https://stackoverflow.com/a/58268695 for more info on how these args work.
|
||||
# As an example: if you wanted to go from 24 hours to 30 minutes that would be going
|
||||
# from 86400 seconds to 1800 seconds which would be 1800 / 86400 = 0.02.
|
||||
# The -r (framerate) dictates how smooth the output video is.
|
||||
# So the args would be -vf setpts=0.02*PTS -r 30 in that case.
|
||||
timelapse_args: "-vf setpts=0.04*PTS -r 30"
|
||||
# Optional: Recording Preview Settings
|
||||
preview:
|
||||
# Optional: Quality of recording preview (default: shown below).
|
||||
# Options are: very_low, low, medium, high, very_high
|
||||
quality: medium
|
||||
# Optional: Event recording settings
|
||||
events:
|
||||
# Optional: Number of seconds before the event to include (default: shown below)
|
||||
pre_capture: 5
|
||||
# Optional: Number of seconds after the event to include (default: shown below)
|
||||
post_capture: 5
|
||||
# Optional: Objects to save recordings for. (default: all tracked objects)
|
||||
objects:
|
||||
- person
|
||||
# Optional: Retention settings for recordings of events
|
||||
retain:
|
||||
# Required: Default retention days (default: shown below)
|
||||
default: 10
|
||||
# Optional: Mode for retention. (default: shown below)
|
||||
# all - save all recording segments for events regardless of activity
|
||||
# motion - save all recordings segments for events with any detected motion
|
||||
# active_objects - save all recording segments for event with active/moving objects
|
||||
#
|
||||
# NOTE: If the retain mode for the camera is more restrictive than the mode configured
|
||||
# here, the segments will already be gone by the time this mode is applied.
|
||||
# For example, if the camera retain mode is "motion", the segments without motion are
|
||||
# never stored, so setting the mode to "all" here won't bring them back.
|
||||
mode: motion
|
||||
# Optional: Per object retention days
|
||||
objects:
|
||||
person: 15
|
||||
|
||||
# Optional: Configuration for the jpg snapshots written to the clips directory for each event
|
||||
# NOTE: Can be overridden at the camera level
|
||||
snapshots:
|
||||
# Optional: Enable writing jpg snapshot to /media/frigate/clips (default: shown below)
|
||||
enabled: False
|
||||
# Optional: save a clean PNG copy of the snapshot image (default: shown below)
|
||||
clean_copy: True
|
||||
# Optional: print a timestamp on the snapshots (default: shown below)
|
||||
timestamp: False
|
||||
# Optional: draw bounding box on the snapshots (default: shown below)
|
||||
bounding_box: True
|
||||
# Optional: crop the snapshot (default: shown below)
|
||||
crop: False
|
||||
# Optional: height to resize the snapshot to (default: original size)
|
||||
height: 175
|
||||
# Optional: Restrict snapshots to objects that entered any of the listed zones (default: no required zones)
|
||||
required_zones: []
|
||||
# Optional: Camera override for retention settings (default: global values)
|
||||
retain:
|
||||
# Required: Default retention days (default: shown below)
|
||||
default: 10
|
||||
# Optional: Per object retention days
|
||||
objects:
|
||||
person: 15
|
||||
# Optional: quality of the encoded jpeg, 0-100 (default: shown below)
|
||||
quality: 70
|
||||
|
||||
# Optional: Restream configuration
|
||||
# Uses https://github.com/AlexxIT/go2rtc (v1.8.3)
|
||||
go2rtc:
|
||||
|
||||
# Optional: jsmpeg stream configuration for WebUI
|
||||
live:
|
||||
# Optional: Set the name of the stream that should be used for live view
|
||||
# in frigate WebUI. (default: name of camera)
|
||||
stream_name: camera_name
|
||||
# Optional: Set the height of the jsmpeg stream. (default: 720)
|
||||
# This must be less than or equal to the height of the detect stream. Lower resolutions
|
||||
# reduce bandwidth required for viewing the jsmpeg stream. Width is computed to match known aspect ratio.
|
||||
height: 720
|
||||
# Optional: Set the encode quality of the jsmpeg stream (default: shown below)
|
||||
# 1 is the highest quality, and 31 is the lowest. Lower quality feeds utilize less CPU resources.
|
||||
quality: 8
|
||||
|
||||
# Optional: in-feed timestamp style configuration
|
||||
# NOTE: Can be overridden at the camera level
|
||||
timestamp_style:
|
||||
# Optional: Position of the timestamp (default: shown below)
|
||||
# "tl" (top left), "tr" (top right), "bl" (bottom left), "br" (bottom right)
|
||||
position: "tl"
|
||||
# Optional: Format specifier conform to the Python package "datetime" (default: shown below)
|
||||
# Additional Examples:
|
||||
# german: "%d.%m.%Y %H:%M:%S"
|
||||
format: "%m/%d/%Y %H:%M:%S"
|
||||
# Optional: Color of font
|
||||
color:
|
||||
# All Required when color is specified (default: shown below)
|
||||
red: 255
|
||||
green: 255
|
||||
blue: 255
|
||||
# Optional: Line thickness of font (default: shown below)
|
||||
thickness: 2
|
||||
# Optional: Effect of lettering (default: shown below)
|
||||
# None (No effect),
|
||||
# "solid" (solid background in inverse color of font)
|
||||
# "shadow" (shadow for font)
|
||||
effect: None
|
||||
|
||||
# Required
|
||||
cameras:
|
||||
# Required: name of the camera
|
||||
back:
|
||||
# Optional: Enable/Disable the camera (default: shown below).
|
||||
# If disabled: config is used but no live stream and no capture etc.
|
||||
# Events/Recordings are still viewable.
|
||||
enabled: True
|
||||
# Required: ffmpeg settings for the camera
|
||||
ffmpeg:
|
||||
# Required: A list of input streams for the camera. See documentation for more information.
|
||||
inputs:
|
||||
# Required: the path to the stream
|
||||
# NOTE: path may include environment variables or docker secrets, which must begin with 'FRIGATE_' and be referenced in {}
|
||||
- path: rtsp://viewer:{FRIGATE_RTSP_PASSWORD}@10.0.10.10:554/cam/realmonitor?channel=1&subtype=2
|
||||
# Required: list of roles for this stream. valid values are: audio,detect,record
|
||||
# NOTICE: In addition to assigning the audio, detect, and record roles
|
||||
# they must also be enabled in the camera config.
|
||||
roles:
|
||||
- audio
|
||||
- detect
|
||||
- record
|
||||
# Optional: stream specific global args (default: inherit)
|
||||
# global_args:
|
||||
# Optional: stream specific hwaccel args (default: inherit)
|
||||
# hwaccel_args:
|
||||
# Optional: stream specific input args (default: inherit)
|
||||
# input_args:
|
||||
# Optional: camera specific global args (default: inherit)
|
||||
# global_args:
|
||||
# Optional: camera specific hwaccel args (default: inherit)
|
||||
# hwaccel_args:
|
||||
# Optional: camera specific input args (default: inherit)
|
||||
# input_args:
|
||||
# Optional: camera specific output args (default: inherit)
|
||||
# output_args:
|
||||
|
||||
# Optional: timeout for highest scoring image before allowing it
|
||||
# to be replaced by a newer image. (default: shown below)
|
||||
best_image_timeout: 60
|
||||
|
||||
# Optional: URL to visit the camera web UI directly from the system page. Might not be available on every camera.
|
||||
webui_url: ""
|
||||
|
||||
# Optional: zones for this camera
|
||||
zones:
|
||||
# Required: name of the zone
|
||||
# NOTE: This must be different than any camera names, but can match with another zone on another
|
||||
# camera.
|
||||
front_steps:
|
||||
# Required: List of x,y coordinates to define the polygon of the zone.
|
||||
# NOTE: Presence in a zone is evaluated only based on the bottom center of the objects bounding box.
|
||||
coordinates: 0.284,0.997,0.389,0.869,0.410,0.745
|
||||
# Optional: Number of consecutive frames required for object to be considered present in the zone (default: shown below).
|
||||
inertia: 3
|
||||
# Optional: Number of seconds that an object must loiter to be considered in the zone (default: shown below)
|
||||
loitering_time: 0
|
||||
# Optional: List of objects that can trigger this zone (default: all tracked objects)
|
||||
objects:
|
||||
- person
|
||||
# Optional: Zone level object filters.
|
||||
# NOTE: The global and camera filters are applied upstream.
|
||||
filters:
|
||||
person:
|
||||
min_area: 5000
|
||||
max_area: 100000
|
||||
threshold: 0.7
|
||||
|
||||
# Optional: Configuration for the jpg snapshots published via MQTT
|
||||
mqtt:
|
||||
# Optional: Enable publishing snapshot via mqtt for camera (default: shown below)
|
||||
# NOTE: Only applies to publishing image data to MQTT via 'frigate/<camera_name>/<object_name>/snapshot'.
|
||||
# All other messages will still be published.
|
||||
enabled: True
|
||||
# Optional: print a timestamp on the snapshots (default: shown below)
|
||||
timestamp: True
|
||||
# Optional: draw bounding box on the snapshots (default: shown below)
|
||||
bounding_box: True
|
||||
# Optional: crop the snapshot (default: shown below)
|
||||
crop: True
|
||||
# Optional: height to resize the snapshot to (default: shown below)
|
||||
height: 270
|
||||
# Optional: jpeg encode quality (default: shown below)
|
||||
quality: 70
|
||||
# Optional: Restrict mqtt messages to objects that entered any of the listed zones (default: no required zones)
|
||||
required_zones: []
|
||||
|
||||
# Optional: Configuration for how camera is handled in the GUI.
|
||||
ui:
|
||||
# Optional: Adjust sort order of cameras in the UI. Larger numbers come later (default: shown below)
|
||||
# By default the cameras are sorted alphabetically.
|
||||
order: 0
|
||||
# Optional: Whether or not to show the camera in the Frigate UI (default: shown below)
|
||||
dashboard: True
|
||||
|
||||
# Optional: connect to ONVIF camera
|
||||
# to enable PTZ controls.
|
||||
onvif:
|
||||
# Required: host of the camera being connected to.
|
||||
host: 0.0.0.0
|
||||
# Optional: ONVIF port for device (default: shown below).
|
||||
port: 8000
|
||||
# Optional: username for login.
|
||||
# NOTE: Some devices require admin to access ONVIF.
|
||||
user: admin
|
||||
# Optional: password for login.
|
||||
password: admin
|
||||
# Optional: PTZ camera object autotracking. Keeps a moving object in
|
||||
# the center of the frame by automatically moving the PTZ camera.
|
||||
autotracking:
|
||||
# Optional: enable/disable object autotracking. (default: shown below)
|
||||
enabled: False
|
||||
# Optional: calibrate the camera on startup (default: shown below)
|
||||
# A calibration will move the PTZ in increments and measure the time it takes to move.
|
||||
# The results are used to help estimate the position of tracked objects after a camera move.
|
||||
# Frigate will update your config file automatically after a calibration with
|
||||
# a "movement_weights" entry for the camera. You should then set calibrate_on_startup to False.
|
||||
calibrate_on_startup: False
|
||||
# Optional: the mode to use for zooming in/out on objects during autotracking. (default: shown below)
|
||||
# Available options are: disabled, absolute, and relative
|
||||
# disabled - don't zoom in/out on autotracked objects, use pan/tilt only
|
||||
# absolute - use absolute zooming (supported by most PTZ capable cameras)
|
||||
# relative - use relative zooming (not supported on all PTZs, but makes concurrent pan/tilt/zoom movements)
|
||||
zooming: disabled
|
||||
# Optional: A value to change the behavior of zooming on autotracked objects. (default: shown below)
|
||||
# A lower value will keep more of the scene in view around a tracked object.
|
||||
# A higher value will zoom in more on a tracked object, but Frigate may lose tracking more quickly.
|
||||
# The value should be between 0.1 and 0.75
|
||||
zoom_factor: 0.3
|
||||
# Optional: list of objects to track from labelmap.txt (default: shown below)
|
||||
track:
|
||||
- person
|
||||
# Required: Begin automatically tracking an object when it enters any of the listed zones.
|
||||
required_zones:
|
||||
- zone_name
|
||||
# Required: Name of ONVIF preset in camera's firmware to return to when tracking is over. (default: shown below)
|
||||
return_preset: home
|
||||
# Optional: Seconds to delay before returning to preset. (default: shown below)
|
||||
timeout: 10
|
||||
# Optional: Values generated automatically by a camera calibration. Do not modify these manually. (default: shown below)
|
||||
movement_weights: []
|
||||
|
||||
# Optional: Configuration for how to sort the cameras in the Birdseye view.
|
||||
birdseye:
|
||||
# Optional: Adjust sort order of cameras in the Birdseye view. Larger numbers come later (default: shown below)
|
||||
# By default the cameras are sorted alphabetically.
|
||||
order: 0
|
||||
|
||||
# Optional
|
||||
ui:
|
||||
# Optional: Set the default live mode for cameras in the UI (default: shown below)
|
||||
live_mode: mse
|
||||
# Optional: Set a timezone to use in the UI (default: use browser local time)
|
||||
# timezone: America/Denver
|
||||
# Optional: Set the time format used.
|
||||
# Options are browser, 12hour, or 24hour (default: shown below)
|
||||
time_format: browser
|
||||
# Optional: Set the date style for a specified length.
|
||||
# Options are: full, long, medium, short
|
||||
# Examples:
|
||||
# short: 2/11/23
|
||||
# medium: Feb 11, 2023
|
||||
# full: Saturday, February 11, 2023
|
||||
# (default: shown below).
|
||||
date_style: short
|
||||
# Optional: Set the time style for a specified length.
|
||||
# Options are: full, long, medium, short
|
||||
# Examples:
|
||||
# short: 8:14 PM
|
||||
# medium: 8:15:22 PM
|
||||
# full: 8:15:22 PM Mountain Standard Time
|
||||
# (default: shown below).
|
||||
time_style: medium
|
||||
# Optional: Ability to manually override the date / time styling to use strftime format
|
||||
# https://www.gnu.org/software/libc/manual/html_node/Formatting-Calendar-Time.html
|
||||
# possible values are shown above (default: not set)
|
||||
strftime_fmt: "%Y/%m/%d %H:%M"
|
||||
|
||||
# Optional: Telemetry configuration
|
||||
telemetry:
|
||||
# Optional: Enabled network interfaces for bandwidth stats monitoring (default: empty list, let nethogs search all)
|
||||
network_interfaces:
|
||||
- eth
|
||||
- enp
|
||||
- eno
|
||||
- ens
|
||||
- wl
|
||||
- lo
|
||||
# Optional: Configure system stats
|
||||
stats:
|
||||
# Enable AMD GPU stats (default: shown below)
|
||||
amd_gpu_stats: True
|
||||
# Enable Intel GPU stats (default: shown below)
|
||||
intel_gpu_stats: True
|
||||
# Enable network bandwidth stats monitoring for camera ffmpeg processes, go2rtc, and object detectors. (default: shown below)
|
||||
# NOTE: The container must either be privileged or have cap_net_admin, cap_net_raw capabilities enabled.
|
||||
network_bandwidth: False
|
||||
# Optional: Enable the latest version outbound check (default: shown below)
|
||||
# NOTE: If you use the HomeAssistant integration, disabling this will prevent it from reporting new versions
|
||||
version_check: True
|
||||
|
||||
# Optional: Camera groups (default: no groups are setup)
|
||||
# NOTE: It is recommended to use the UI to setup camera groups
|
||||
camera_groups:
|
||||
# Required: Name of camera group
|
||||
front:
|
||||
# Required: list of cameras in the group
|
||||
cameras:
|
||||
- front_cam
|
||||
- side_cam
|
||||
- front_doorbell_cam
|
||||
# Required: icon used for group
|
||||
icon: car
|
||||
# Required: index of this group
|
||||
order: 0
|
||||
```
|
||||
@@ -7,17 +7,18 @@ title: Restream
|
||||
|
||||
Frigate can restream your video feed as an RTSP feed for other applications such as Home Assistant to utilize it at `rtsp://<frigate_host>:8554/<camera_name>`. Port 8554 must be open. [This allows you to use a video feed for detection in Frigate and Home Assistant live view at the same time without having to make two separate connections to the camera](#reduce-connections-to-camera). The video feed is copied from the original video feed directly to avoid re-encoding. This feed does not include any annotation by Frigate.
|
||||
|
||||
Frigate uses [go2rtc](https://github.com/AlexxIT/go2rtc/tree/v1.8.1) to provide its restream and MSE/WebRTC capabilities. The go2rtc config is hosted at the `go2rtc` in the config, see [go2rtc docs](https://github.com/AlexxIT/go2rtc/tree/v1.8.1#configuration) for more advanced configurations and features.
|
||||
Frigate uses [go2rtc](https://github.com/AlexxIT/go2rtc/tree/v1.9.2) to provide its restream and MSE/WebRTC capabilities. The go2rtc config is hosted at the `go2rtc` in the config, see [go2rtc docs](https://github.com/AlexxIT/go2rtc/tree/v1.9.2#configuration) for more advanced configurations and features.
|
||||
|
||||
:::note
|
||||
|
||||
You can access the go2rtc webUI at `http://frigate_ip:5000/live/webrtc` which can be helpful to debug as well as provide useful information about your camera streams.
|
||||
You can access the go2rtc stream info at `http://frigate_ip:8080/api/go2rtc/streams` which can be helpful to debug as well as provide useful information about your camera streams.
|
||||
|
||||
:::
|
||||
|
||||
### Birdseye Restream
|
||||
|
||||
Birdseye RTSP restream can be accessed at `rtsp://<frigate_host>:8554/birdseye`. Enabling the birdseye restream will cause birdseye to run 24/7 which may increase CPU usage somewhat.
|
||||
|
||||
```yaml
|
||||
birdseye:
|
||||
restream: true
|
||||
@@ -32,16 +33,11 @@ go2rtc:
|
||||
rtsp:
|
||||
username: "admin"
|
||||
password: "pass"
|
||||
streams:
|
||||
...
|
||||
streams: ...
|
||||
```
|
||||
|
||||
**NOTE:** This does not apply to localhost requests, there is no need to provide credentials when using the restream as a source for frigate cameras.
|
||||
|
||||
## RTMP (Deprecated)
|
||||
|
||||
In previous Frigate versions RTMP was used for re-streaming. RTMP has disadvantages however including being incompatible with H.265, high bitrates, and certain audio codecs. RTMP is deprecated and it is recommended to move to the new restream role.
|
||||
|
||||
## Reduce Connections To Camera
|
||||
|
||||
Some cameras only support one active connection or you may just want to have a single connection open to the camera. The RTSP restream allows this to be possible.
|
||||
@@ -138,7 +134,7 @@ cameras:
|
||||
|
||||
## Advanced Restream Configurations
|
||||
|
||||
The [exec](https://github.com/AlexxIT/go2rtc/tree/v1.8.1#source-exec) source in go2rtc can be used for custom ffmpeg commands. An example is below:
|
||||
The [exec](https://github.com/AlexxIT/go2rtc/tree/v1.9.2#source-exec) source in go2rtc can be used for custom ffmpeg commands. An example is below:
|
||||
|
||||
NOTE: The output will need to be passed with two curly braces `{{output}}`
|
||||
|
||||
|
||||
53
docs/docs/configuration/review.md
Normal file
53
docs/docs/configuration/review.md
Normal file
@@ -0,0 +1,53 @@
|
||||
---
|
||||
id: review
|
||||
title: Review
|
||||
---
|
||||
|
||||
The Review page of the Frigate UI is for quickly reviewing historical footage of interest from your cameras. _Review items_ are indicated on a vertical timeline and displayed as a grid of previews - bandwidth-optimized, low frame rate, low resolution videos. Hovering over or swiping a preview plays the video and marks it as reviewed. If more in-depth analysis is required, the preview can be clicked/tapped and the full frame rate, full resolution recording is displayed.
|
||||
|
||||
Review items are filterable by date, object type, and camera.
|
||||
|
||||
## Alerts and Detections
|
||||
|
||||
Not every segment of video captured by Frigate may be of the same level of interest to you. Video of people who enter your property may be a different priority than those walking by on the sidewalk. For this reason, Frigate 0.14 categorizes review items as _alerts_ and _detections_. By default, all person and car objects are considered alerts. You can refine categorization of your review items by configuring required zones for them.
|
||||
|
||||
## Restricting alerts to specific labels
|
||||
|
||||
By default a review item will only be marked as an alert if a person or car is detected. This can be configured to include any object or audio label using the following config:
|
||||
|
||||
```yaml
|
||||
# can be overridden at the camera level
|
||||
review:
|
||||
alerts:
|
||||
labels:
|
||||
- car
|
||||
- cat
|
||||
- dog
|
||||
- person
|
||||
- speech
|
||||
```
|
||||
|
||||
## Restricting detections to specific labels
|
||||
|
||||
By default all detections that do not qualify as an alert qualify as a detection. However, detections can further be filtered to only include certain labels or certain zones.
|
||||
|
||||
By default a review item will only be marked as an alert if a person or car is detected. This can be configured to include any object or audio label using the following config:
|
||||
|
||||
```yaml
|
||||
# can be overridden at the camera level
|
||||
review:
|
||||
detections:
|
||||
labels:
|
||||
- bark
|
||||
- dog
|
||||
```
|
||||
|
||||
## Restricting review items to specific zones
|
||||
|
||||
By default a review item will be created if any `review -> alerts -> labels` and `review -> detections -> labels` are detected anywhere in the camera frame. You will likely want to configure review items to only be created when the object enters an area of interest, [see the zone docs for more information](./zones.md#restricting-alerts-and-detections-to-specific-zones)
|
||||
|
||||
:::info
|
||||
|
||||
Because zones don't apply to audio, audio labels will always be marked as an alert.
|
||||
|
||||
:::
|
||||
@@ -3,6 +3,10 @@ id: snapshots
|
||||
title: Snapshots
|
||||
---
|
||||
|
||||
Frigate can save a snapshot image to `/media/frigate/clips` for each event named as `<camera>-<id>.jpg`.
|
||||
Frigate can save a snapshot image to `/media/frigate/clips` for each object that is detected named as `<camera>-<id>.jpg`. They are also accessible [via the api](../integrations/api.md#get-apieventsidsnapshotjpg)
|
||||
|
||||
Snapshots sent via MQTT are configured in the [config file](https://docs.frigate.video/configuration/) under `cameras -> your_camera -> mqtt`
|
||||
For users with Frigate+ enabled, snapshots are accessible in the UI in the Frigate+ pane to allow for quick submission to the Frigate+ service.
|
||||
|
||||
To only save snapshots for objects that enter a specific zone, [see the zone docs](./zones.md#restricting-snapshots-to-specific-zones)
|
||||
|
||||
Snapshots sent via MQTT are configured in the [config file](https://docs.frigate.video/configuration/) under `cameras -> your_camera -> mqtt`
|
||||
|
||||
@@ -23,6 +23,30 @@ NOTE: There is no way to disable stationary object tracking with this value.
|
||||
|
||||
`threshold` is the number of frames an object needs to remain relatively still before it is considered stationary.
|
||||
|
||||
## Avoiding stationary objects
|
||||
## Why does Frigate track stationary objects?
|
||||
|
||||
In some cases, like a driveway, you may prefer to only have an event when a car is coming & going vs a constant event of it stationary in the driveway. [This docs sections](../guides/stationary_objects.md) explains how to approach that scenario.
|
||||
Frigate didn't always track stationary objects. In fact, it didn't even track objects at all initially.
|
||||
|
||||
Let's look at an example use case: I want to record any cars that enter my driveway.
|
||||
|
||||
One might simply think "Why not just run object detection any time there is motion around the driveway area and notify if the bounding box is in that zone?"
|
||||
|
||||
With that approach, what video is related to the car that entered the driveway? Did it come from the left or right? Was it parked across the street for an hour before turning into the driveway? One approach is to just record 24/7 or for motion (on any changed changed pixels) and not attempt to do that at all. This is what most other NVRs do. Just don't even try to identify a start and end for that object since it's hard and you will be wrong some portion of the time.
|
||||
|
||||
Couldn't you just look at when motion stopped and started? Motion for a video feed is nothing more than looking for pixels that are different than they were in previous frames. If the car entered the driveway while someone was mowing the grass, how would you know which motion was for the car and which was for the person when they mow along the driveway or street? What if another car was driving the other direction on the street? Or what if its a windy day and the bush by your mailbox is blowing around?
|
||||
|
||||
In order to do it more accurately, you need to identify objects and track them with a unique id. In each subsequent frame, everything has moved a little and you need to determine which bounding boxes go with each object from the previous frame.
|
||||
|
||||
Tracking objects across frames is a challenging problem. Especially if you want to do it in real time. There are entire competitions for research algorithms to see which of them can do it the most accurately. Zero of them are accurate 100% of the time. Even the ones that can't do it in realtime. There is always an error rate in the algorithm.
|
||||
|
||||
Now consider that the car is driving down a street that has other cars parked along it. It will drive behind some of these cars and in front of others. There may even be a car driving the opposite direction.
|
||||
|
||||
Let's assume for now that we are NOT already tracking two parked cars on the street or the car parked in the driveway, ie, there is no stationary object tracking.
|
||||
|
||||
As the car you are tracking approaches an area with 2 cars parked, the headlights reflect off the parked cars and the car parked in your driveway. The pixel values are different in that area, so there is motion detected. Object detection runs and identifies the remaining 3 cars. In the previous frame, you had a single bounding box from the car you are tracking. Now you have 4. The original object, the 2 cars on the street and the one in your driveway.
|
||||
|
||||
Now you have to determine which of the bounding boxes in this frame should be matched to the tracking id from the previous frame where you only had one. Remember, you have never seen these additional 3 cars before, so you know nothing about them. On top of that the bounding box for the car you are tracking has now moved to a new location, so which of the 4 belongs to the car you were originally tracking? The algorithms here are fairly good. They use a Kalman filter to predict the next location of an object using the historical bounding boxes and the bounding box closest to the predicted location is linked. It's right sometimes, but the error rate is going to be high when there are 4 possible bounding boxes.
|
||||
|
||||
Now let's assume that those other 3 cars were already being tracked as stationary objects, so the car driving down the street is a new 4th car. The object tracker knows we have had 3 cars and we now have 4. As the new car approaches the parked cars, the bounding boxes for all 4 cars is predicted based on the previous frames. The predicted boxes for the parked cars is pretty much a 100% overlap with the bounding boxes in the new frame. The parked cars are slam dunk matches to the tracking ids they had before and the only one left is the remaining bounding box which gets assigned to the new car. This results in a much lower error rate. Not perfect, but better.
|
||||
|
||||
The most difficult scenario that causes IDs to be assigned incorrectly is when an object completely occludes another object. When a car drives in front of another car and its no longer visible, a bounding box disappeared and it's a bit of a toss up when assigning the id since it's difficult to know which one is in front of the other. This happens for cars passing in front of other cars fairly often. It's something that we want to improve in the future.
|
||||
|
||||
@@ -1,15 +0,0 @@
|
||||
---
|
||||
id: user_interface
|
||||
title: User Interface Configurations
|
||||
---
|
||||
|
||||
### Experimental UI
|
||||
|
||||
While developing and testing new components, users may decide to opt-in to test potential new features on the front-end.
|
||||
|
||||
```yaml
|
||||
ui:
|
||||
use_experimental: true
|
||||
```
|
||||
|
||||
Note that experimental changes may contain bugs or may be removed at any time in future releases of the software. Use of these features are presented as-is and with no functional guarantee.
|
||||
@@ -5,28 +5,61 @@ title: Zones
|
||||
|
||||
Zones allow you to define a specific area of the frame and apply additional filters for object types so you can determine whether or not an object is within a particular area. Presence in a zone is evaluated based on the bottom center of the bounding box for the object. It does not matter how much of the bounding box overlaps with the zone.
|
||||
|
||||
For example, the cat in this image is currently in Zone 1, but **not** Zone 2.
|
||||

|
||||
|
||||
Zones cannot have the same name as a camera. If desired, a single zone can include multiple cameras if you have multiple cameras covering the same area by configuring zones with the same name for each camera.
|
||||
|
||||
During testing, enable the Zones option for the debug feed so you can adjust as needed. The zone line will increase in thickness when any object enters the zone.
|
||||
During testing, enable the Zones option for the Debug view of your camera (Settings --> Debug) so you can adjust as needed. The zone line will increase in thickness when any object enters the zone.
|
||||
|
||||
To create a zone, follow [the steps for a "Motion mask"](masks.md), but use the section of the web UI for creating a zone instead.
|
||||
|
||||
### Restricting events to specific zones
|
||||
### Restricting alerts and detections to specific zones
|
||||
|
||||
Often you will only want events to be created when an object enters areas of interest. This is done using zones along with setting required_zones. Let's say you only want to be notified when an object enters your entire_yard zone, the config would be:
|
||||
Often you will only want alerts to be created when an object enters areas of interest. This is done using zones along with setting required_zones. Let's say you only want to have an alert created when an object enters your entire_yard zone, the config would be:
|
||||
|
||||
```yaml
|
||||
camera:
|
||||
record:
|
||||
events:
|
||||
cameras:
|
||||
name_of_your_camera:
|
||||
review:
|
||||
alerts:
|
||||
required_zones:
|
||||
- entire_yard
|
||||
zones:
|
||||
entire_yard:
|
||||
coordinates: ...
|
||||
```
|
||||
|
||||
You may also want to filter detections to only be created when an object enters a secondary area of interest. This is done using zones along with setting required_zones. Let's say you want alerts when an object enters the inner area of the yard but detections when an object enters the edge of the yard, the config would be
|
||||
|
||||
```yaml
|
||||
cameras:
|
||||
name_of_your_camera:
|
||||
review:
|
||||
alerts:
|
||||
required_zones:
|
||||
- inner_yard
|
||||
detections:
|
||||
required_zones:
|
||||
- edge_yard
|
||||
zones:
|
||||
edge_yard:
|
||||
coordinates: ...
|
||||
inner_yard:
|
||||
coordinates: ...
|
||||
```
|
||||
|
||||
### Restricting snapshots to specific zones
|
||||
|
||||
```yaml
|
||||
cameras:
|
||||
name_of_your_camera:
|
||||
snapshots:
|
||||
required_zones:
|
||||
- entire_yard
|
||||
snapshots:
|
||||
required_zones:
|
||||
- entire_yard
|
||||
zones:
|
||||
entire_yard:
|
||||
coordinates: ...
|
||||
zones:
|
||||
entire_yard:
|
||||
coordinates: ...
|
||||
```
|
||||
|
||||
### Restricting zones to specific objects
|
||||
@@ -34,49 +67,80 @@ camera:
|
||||
Sometimes you want to limit a zone to specific object types to have more granular control of when events/snapshots are saved. The following example will limit one zone to person objects and the other to cars.
|
||||
|
||||
```yaml
|
||||
camera:
|
||||
record:
|
||||
events:
|
||||
cameras:
|
||||
name_of_your_camera:
|
||||
record:
|
||||
events:
|
||||
required_zones:
|
||||
- entire_yard
|
||||
- front_yard_street
|
||||
snapshots:
|
||||
required_zones:
|
||||
- entire_yard
|
||||
- front_yard_street
|
||||
snapshots:
|
||||
required_zones:
|
||||
- entire_yard
|
||||
- front_yard_street
|
||||
zones:
|
||||
entire_yard:
|
||||
coordinates: ... (everywhere you want a person)
|
||||
objects:
|
||||
- person
|
||||
front_yard_street:
|
||||
coordinates: ... (just the street)
|
||||
objects:
|
||||
- car
|
||||
zones:
|
||||
entire_yard:
|
||||
coordinates: ... (everywhere you want a person)
|
||||
objects:
|
||||
- person
|
||||
front_yard_street:
|
||||
coordinates: ... (just the street)
|
||||
objects:
|
||||
- car
|
||||
```
|
||||
|
||||
Only car objects can trigger the `front_yard_street` zone and only person can trigger the `entire_yard`. You will get events for person objects that enter anywhere in the yard, and events for cars only if they enter the street.
|
||||
|
||||
### Zone Loitering
|
||||
|
||||
Sometimes objects are expected to be passing through a zone, but an object loitering in an area is unexpected. Zones can be configured to have a minimum loitering time before the object will be considered in the zone.
|
||||
|
||||
```yaml
|
||||
cameras:
|
||||
name_of_your_camera:
|
||||
zones:
|
||||
sidewalk:
|
||||
loitering_time: 4 # unit is in seconds
|
||||
objects:
|
||||
- person
|
||||
```
|
||||
|
||||
### Zone Inertia
|
||||
|
||||
Sometimes an objects bounding box may be slightly incorrect and the bottom center of the bounding box is inside the zone while the object is not actually in the zone. Zone inertia helps guard against this by requiring an object's bounding box to be within the zone for multiple consecutive frames. This value can be configured:
|
||||
|
||||
```yaml
|
||||
camera:
|
||||
zones:
|
||||
front_yard:
|
||||
inertia: 3
|
||||
objects:
|
||||
- person
|
||||
cameras:
|
||||
name_of_your_camera:
|
||||
zones:
|
||||
front_yard:
|
||||
inertia: 3
|
||||
objects:
|
||||
- person
|
||||
```
|
||||
|
||||
There may also be cases where you expect an object to quickly enter and exit a zone, like when a car is pulling into the driveway, and you may want to have the object be considered present in the zone immediately:
|
||||
|
||||
```yaml
|
||||
camera:
|
||||
zones:
|
||||
driveway_entrance:
|
||||
inertia: 1
|
||||
objects:
|
||||
- car
|
||||
cameras:
|
||||
name_of_your_camera:
|
||||
zones:
|
||||
driveway_entrance:
|
||||
inertia: 1
|
||||
objects:
|
||||
- car
|
||||
```
|
||||
|
||||
### Loitering Time
|
||||
|
||||
Zones support a `loitering_time` configuration which can be used to only consider an object as part of a zone if they loiter in the zone for the specified number of seconds. This can be used, for example, to create alerts for cars that stop on the street but not cars that just drive past your camera.
|
||||
|
||||
```yaml
|
||||
cameras:
|
||||
name_of_your_camera:
|
||||
zones:
|
||||
front_yard:
|
||||
loitering_time: 5 # unit is in seconds
|
||||
objects:
|
||||
- person
|
||||
```
|
||||
|
||||
@@ -33,7 +33,6 @@ Fork [blakeblackshear/frigate-hass-integration](https://github.com/blakeblackshe
|
||||
|
||||
### Prerequisites
|
||||
|
||||
- [Frigate source code](#frigate-core-web-and-docs)
|
||||
- GNU make
|
||||
- Docker
|
||||
- An extra detector (Coral, OpenVINO, etc.) is optional but recommended to simulate real world performance.
|
||||
@@ -95,7 +94,7 @@ The following commands are used inside the container to ensure hardware accelera
|
||||
|
||||
**Raspberry Pi (64bit)**
|
||||
|
||||
This should show <50% CPU in top, and ~80% CPU without `-c:v h264_v4l2m2m`.
|
||||
This should show less than 50% CPU in top, and ~80% CPU without `-c:v h264_v4l2m2m`.
|
||||
|
||||
```shell
|
||||
ffmpeg -c:v h264_v4l2m2m -re -stream_loop -1 -i https://streams.videolan.org/ffmpeg/incoming/720p60.mp4 -f rawvideo -pix_fmt yuv420p pipe: > /dev/null
|
||||
@@ -129,9 +128,8 @@ ffmpeg -c:v h264_qsv -re -stream_loop -1 -i https://streams.videolan.org/ffmpeg/
|
||||
|
||||
### Prerequisites
|
||||
|
||||
- [Frigate source code](#frigate-core-web-and-docs)
|
||||
- All [core](#core) prerequisites _or_ another running Frigate instance locally available
|
||||
- Node.js 16
|
||||
- Node.js 20
|
||||
|
||||
### Making changes
|
||||
|
||||
@@ -155,6 +153,12 @@ cd web && npm install
|
||||
cd web && npm run dev
|
||||
```
|
||||
|
||||
##### 3a. Run the development server against a non-local instance
|
||||
|
||||
To run the development server against a non-local instance, you will need to
|
||||
replace the `localhost` values in `vite.config.ts` with the IP address of the
|
||||
non-local backend server.
|
||||
|
||||
#### 4. Making changes
|
||||
|
||||
The Web UI is built using [Vite](https://vitejs.dev/), [Preact](https://preactjs.com), and [Tailwind CSS](https://tailwindcss.com).
|
||||
@@ -182,8 +186,7 @@ npm run test
|
||||
|
||||
### Prerequisites
|
||||
|
||||
- [Frigate source code](#frigate-core-web-and-docs)
|
||||
- Node.js 16
|
||||
- Node.js 20
|
||||
|
||||
### Making changes
|
||||
|
||||
@@ -201,7 +204,7 @@ npm run start
|
||||
|
||||
This command starts a local development server and open up a browser window. Most changes are reflected live without having to restart the server.
|
||||
|
||||
The docs are built using [Docusaurus v2](https://v2.docusaurus.io). Please refer to the Docusaurus docs for more information on how to modify Frigate's documentation.
|
||||
The docs are built using [Docusaurus v3](https://docusaurus.io). Please refer to the Docusaurus docs for more information on how to modify Frigate's documentation.
|
||||
|
||||
#### 3. Build (optional)
|
||||
|
||||
@@ -222,3 +225,13 @@ docker buildx create --name builder --driver docker-container --driver-opt netwo
|
||||
docker buildx inspect builder --bootstrap
|
||||
make push
|
||||
```
|
||||
|
||||
## Other
|
||||
|
||||
### Nginx
|
||||
|
||||
When testing nginx config changes from within the dev container, the following command can be used to copy and reload the config for testing without rebuilding the container:
|
||||
|
||||
```console
|
||||
sudo cp docker/main/rootfs/usr/local/nginx/conf/* /usr/local/nginx/conf/ && sudo /usr/local/nginx/sbin/nginx -s reload
|
||||
```
|
||||
|
||||
@@ -5,9 +5,9 @@ title: Camera setup
|
||||
|
||||
Cameras configured to output H.264 video and AAC audio will offer the most compatibility with all features of Frigate and Home Assistant. H.265 has better compression, but less compatibility. Chrome 108+, Safari and Edge are the only browsers able to play H.265 and only support a limited number of H.265 profiles. Ideally, cameras should be configured directly for the desired resolutions and frame rates you want to use in Frigate. Reducing frame rates within Frigate will waste CPU resources decoding extra frames that are discarded. There are three different goals that you want to tune your stream configurations around.
|
||||
|
||||
- **Detection**: This is the only stream that Frigate will decode for processing. Also, this is the stream where snapshots will be generated from. The resolution for detection should be tuned for the size of the objects you want to detect. See [Choosing a detect resolution](#choosing-a-detect-resolution) for more details. The recommended frame rate is 5fps, but may need to be higher for very fast moving objects. Higher resolutions and frame rates will drive higher CPU usage on your server.
|
||||
- **Detection**: This is the only stream that Frigate will decode for processing. Also, this is the stream where snapshots will be generated from. The resolution for detection should be tuned for the size of the objects you want to detect. See [Choosing a detect resolution](#choosing-a-detect-resolution) for more details. The recommended frame rate is 5fps, but may need to be higher (10fps is the recommended maximum for most users) for very fast moving objects. Higher resolutions and frame rates will drive higher CPU usage on your server.
|
||||
|
||||
- **Recording**: This stream should be the resolution you wish to store for reference. Typically, this will be the highest resolution your camera supports. I recommend setting this feed to 15 fps.
|
||||
- **Recording**: This stream should be the resolution you wish to store for reference. Typically, this will be the highest resolution your camera supports. I recommend setting this feed in your camera's firmware to 15 fps.
|
||||
|
||||
- **Stream Viewing**: This stream will be rebroadcast as is to Home Assistant for viewing with the stream component. Setting this resolution too high will use significant bandwidth when viewing streams in Home Assistant, and they may not load reliably over slower connections.
|
||||
|
||||
|
||||
58
docs/docs/frigate/glossary.md
Normal file
58
docs/docs/frigate/glossary.md
Normal file
@@ -0,0 +1,58 @@
|
||||
---
|
||||
id: glossary
|
||||
title: Glossary
|
||||
---
|
||||
|
||||
The glossary explains terms commonly used in Frigate's documentation.
|
||||
|
||||
## Bounding Box
|
||||
|
||||
A box returned from the object detection model that outlines an object in the frame. These have multiple colors depending on object type in the debug live view.
|
||||
|
||||
## Event
|
||||
|
||||
The time period starting when a tracked object entered the frame and ending when it left the frame, including any time that the object remained still. Events are saved when it is considered a [true positive](#threshold) and meets the requirements for a snapshot or recording to be saved.
|
||||
|
||||
## False Positive
|
||||
|
||||
An incorrect detection of an object type. For example a dog being detected as a person, a chair being detected as a dog, etc. A person being detected in an area you want to ignore is not a false positive.
|
||||
|
||||
## Mask
|
||||
|
||||
There are two types of masks in Frigate. [See the mask docs for more info](/configuration/masks)
|
||||
|
||||
### Motion Mask
|
||||
|
||||
Motion masks prevent detection of [motion](#motion) in masked areas from triggering Frigate to run object detection, but do not prevent objects from being detected if object detection runs due to motion in nearby areas. For example: camera timestamps, skies, the tops of trees, etc.
|
||||
|
||||
### Object Mask
|
||||
|
||||
Object filter masks drop any bounding boxes where the bottom center (overlap doesn't matter) is in the masked area. It forces them to be considered a [false positive](#false-positive) so that they are ignored.
|
||||
|
||||
## Min Score
|
||||
|
||||
The lowest score that an object can be detected with during tracking, any detection with a lower score will be assumed to be a false positive
|
||||
|
||||
## Motion
|
||||
|
||||
When pixels in the current camera frame are different than previous frames. When many nearby pixels are different in the current frame they grouped together and indicated with a red motion box in the live debug view. [See the motion detection docs for more info](/configuration/motion_detection)
|
||||
|
||||
## Region
|
||||
|
||||
A portion of the camera frame that is sent to object detection, regions can be sent due to motion, active objects, or occasionally for stationary objects. These are represented by green boxes in the debug live view.
|
||||
|
||||
## Snapshot Score
|
||||
|
||||
The score shown in a snapshot is the score of that object at that specific moment in time.
|
||||
|
||||
## Threshold
|
||||
|
||||
The threshold is the median score that an object must reach in order to be considered a true positive.
|
||||
|
||||
## Top Score
|
||||
|
||||
The top score for an object is the highest median score for an object.
|
||||
|
||||
## Zone
|
||||
|
||||
Zones are areas of interest, zones can be used for notifications and for limiting the areas where Frigate will create an [event](#event). [See the zone docs for more info](/configuration/zones)
|
||||
@@ -9,7 +9,7 @@ Cameras that output H.264 video and AAC audio will offer the most compatibility
|
||||
|
||||
I recommend Dahua, Hikvision, and Amcrest in that order. Dahua edges out Hikvision because they are easier to find and order, not because they are better cameras. I personally use Dahua cameras because they are easier to purchase directly. In my experience Dahua and Hikvision both have multiple streams with configurable resolutions and frame rates and rock solid streams. They also both have models with large sensors well known for excellent image quality at night. Not all the models are equal. Larger sensors are better than higher resolutions; especially at night. Amcrest is the fallback recommendation because they are rebranded Dahuas. They are rebranding the lower end models with smaller sensors or less configuration options.
|
||||
|
||||
Many users have reported various issues with Reolink cameras, so I do not recommend them. If you are using Reolink, I suggest the [Reolink specific configuration](../configuration/camera_specific.md#reolink-410520-possibly-others). Wifi cameras are also not recommended. Their streams are less reliable and cause connection loss and/or lost video data.
|
||||
Many users have reported various issues with Reolink cameras, so I do not recommend them. If you are using Reolink, I suggest the [Reolink specific configuration](../configuration/camera_specific.md#reolink-cameras). Wifi cameras are also not recommended. Their streams are less reliable and cause connection loss and/or lost video data.
|
||||
|
||||
Here are some of the camera's I recommend:
|
||||
|
||||
@@ -21,13 +21,12 @@ I may earn a small commission for my endorsement, recommendation, testimonial, o
|
||||
|
||||
## Server
|
||||
|
||||
My current favorite is the Minisforum GK41 because of the dual NICs that allow you to setup a dedicated private network for your cameras where they can be blocked from accessing the internet. There are many used workstation options on eBay that work very well. Anything with an Intel CPU and capable of running Debian should work fine. As a bonus, you may want to look for devices with a M.2 or PCIe express slot that is compatible with the Google Coral. I may earn a small commission for my endorsement, recommendation, testimonial, or link to any products or services from this website.
|
||||
My current favorite is the Beelink EQ12 because of the efficient N100 CPU and dual NICs that allow you to setup a dedicated private network for your cameras where they can be blocked from accessing the internet. There are many used workstation options on eBay that work very well. Anything with an Intel CPU and capable of running Debian should work fine. As a bonus, you may want to look for devices with a M.2 or PCIe express slot that is compatible with the Google Coral. I may earn a small commission for my endorsement, recommendation, testimonial, or link to any products or services from this website.
|
||||
|
||||
| Name | Coral Inference Speed | Coral Compatibility | Notes |
|
||||
| ----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- | --------------------- | ------------------- | --------------------------------------------------------------------------------------------------------------------------------------- |
|
||||
| Odyssey X86 Blue J4125 (<a href="https://amzn.to/3oH4BKi" target="_blank" rel="nofollow noopener sponsored">Amazon</a>) (<a href="https://www.seeedstudio.com/Frigate-NVR-with-Odyssey-Blue-and-Coral-USB-Accelerator.html?utm_source=Frigate" target="_blank" rel="nofollow noopener sponsored">SeeedStudio</a>) | 9-10ms | M.2 B+M, USB | Dual gigabit NICs for easy isolated camera network. Easily handles several 1080p cameras. |
|
||||
| Minisforum GK41 (<a href="https://amzn.to/3ptnb8D" target="_blank" rel="nofollow noopener sponsored">Amazon</a>) | 9-10ms | USB | Dual gigabit NICs for easy isolated camera network. Easily handles several 1080p cameras. |
|
||||
| Intel NUC (<a href="https://amzn.to/3psFlHi" target="_blank" rel="nofollow noopener sponsored">Amazon</a>) | 8-10ms | USB | Overkill for most, but great performance. Can handle many cameras at 5fps depending on typical amounts of motion. Requires extra parts. |
|
||||
| Name | Coral Inference Speed | Coral Compatibility | Notes |
|
||||
| ------------------------------------------------------------------------------------------------------------- | --------------------- | ------------------- | --------------------------------------------------------------------------------------------------------------------------------------- |
|
||||
| Beelink EQ12 (<a href="https://amzn.to/3OlTMJY" target="_blank" rel="nofollow noopener sponsored">Amazon</a>) | 5-10ms | USB | Dual gigabit NICs for easy isolated camera network. Easily handles several 1080p cameras. |
|
||||
| Intel NUC (<a href="https://amzn.to/3psFlHi" target="_blank" rel="nofollow noopener sponsored">Amazon</a>) | 5-10ms | USB | Overkill for most, but great performance. Can handle many cameras at 5fps depending on typical amounts of motion. Requires extra parts. |
|
||||
|
||||
## Detectors
|
||||
|
||||
@@ -41,14 +40,15 @@ The USB version is compatible with the widest variety of hardware and does not r
|
||||
|
||||
The PCIe and M.2 versions require installation of a driver on the host. Follow the instructions for your version from https://coral.ai
|
||||
|
||||
A single Coral can handle many cameras and will be sufficient for the majority of users. You can calculate the maximum performance of your Coral based on the inference speed reported by Frigate. With an inference speed of 10, your Coral will top out at `1000/10=100`, or 100 frames per second. If your detection fps is regularly getting close to that, you should first consider tuning motion masks. If those are already properly configured, a second Coral may be needed.
|
||||
A single Coral can handle many cameras using the default model and will be sufficient for the majority of users. You can calculate the maximum performance of your Coral based on the inference speed reported by Frigate. With an inference speed of 10, your Coral will top out at `1000/10=100`, or 100 frames per second. If your detection fps is regularly getting close to that, you should first consider tuning motion masks. If those are already properly configured, a second Coral may be needed.
|
||||
|
||||
### OpenVino
|
||||
### OpenVINO
|
||||
|
||||
The OpenVINO detector type is able to run on:
|
||||
|
||||
- 6th Gen Intel Platforms and newer that have an iGPU
|
||||
- x86 & Arm64 hosts with VPU Hardware (ex: Intel NCS2)
|
||||
- Most modern AMD CPUs (though this is officially not supported by Intel)
|
||||
|
||||
More information is available [in the detector docs](/configuration/object_detectors#openvino-detector)
|
||||
|
||||
|
||||
@@ -20,6 +20,10 @@ Use of a [Google Coral Accelerator](https://coral.ai/products/) is optional, but
|
||||
|
||||
## Screenshots
|
||||
|
||||

|
||||
|
||||

|
||||
|
||||

|
||||
|
||||

|
||||
|
||||
@@ -13,7 +13,7 @@ Frigate is a Docker container that can be run on any Docker host including as a
|
||||
|
||||
### Operating System
|
||||
|
||||
Frigate runs best with docker installed on bare metal debian-based distributions. For ideal performance, Frigate needs access to underlying hardware for the Coral and GPU devices. Running Frigate in a VM on top of Proxmox, ESXi, Virtualbox, etc. is not recommended. The virtualization layer often introduces a sizable amount of overhead for communication with Coral devices, but [not in all circumstances](https://github.com/blakeblackshear/frigate/discussions/1837).
|
||||
Frigate runs best with Docker installed on bare metal Debian-based distributions. For ideal performance, Frigate needs low overhead access to underlying hardware for the Coral and GPU devices. Running Frigate in a VM on top of Proxmox, ESXi, Virtualbox, etc. is not recommended though [some users have had success with Proxmox](#proxmox).
|
||||
|
||||
Windows is not officially supported, but some users have had success getting it to run under WSL or Virtualbox. Getting the GPU and/or Coral devices properly passed to Frigate may be difficult or impossible. Search previous discussions or issues for help.
|
||||
|
||||
@@ -28,6 +28,17 @@ Frigate uses the following locations for read/write operations in the container.
|
||||
- `/tmp/cache`: Cache location for recording segments. Initial recordings are written here before being checked and converted to mp4 and moved to the recordings folder. Segments generated via the `clip.mp4` endpoints are also concatenated and processed here. It is recommended to use a [`tmpfs`](https://docs.docker.com/storage/tmpfs/) mount for this.
|
||||
- `/dev/shm`: Internal cache for raw decoded frames in shared memory. It is not recommended to modify this directory or map it with docker. The minimum size is impacted by the `shm-size` calculations below.
|
||||
|
||||
### Ports
|
||||
|
||||
The following ports are used by Frigate and can be mapped via docker as required.
|
||||
|
||||
| Port | Description |
|
||||
| ------ | -------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
|
||||
| `8080` | Authenticated UI and API access. Reverse proxies should use this port. |
|
||||
| `5000` | Internal unauthenticated UI and API access. Access to this port should be limited. Intended to be used within the docker network for services that integrate with Frigate. |
|
||||
| `8554` | RTSP restreaming. By default, these streams are unauthenticated. Authentication can be configured in go2rtc section of config. |
|
||||
| `8555` | WebRTC connections for low latency live views. |
|
||||
|
||||
#### Common docker compose storage configurations
|
||||
|
||||
Writing to a local disk or external USB drive:
|
||||
@@ -47,6 +58,12 @@ services:
|
||||
...
|
||||
```
|
||||
|
||||
:::warning
|
||||
|
||||
Users of the Snapcraft build of Docker cannot use storage locations outside your $HOME folder.
|
||||
|
||||
:::
|
||||
|
||||
### Calculating required shm-size
|
||||
|
||||
Frigate utilizes shared memory to store frames during processing. The default `shm-size` provided by Docker is **64MB**.
|
||||
@@ -72,7 +89,6 @@ $ python -c 'print("{:.2f}MB".format(((1280 * 720 * 1.5 * 9 + 270480) / 1048576)
|
||||
|
||||
The shm size cannot be set per container for Home Assistant add-ons. However, this is probably not required since by default Home Assistant Supervisor allocates `/dev/shm` with half the size of your total memory. If your machine has 8GB of memory, chances are that Frigate will have access to up to 4GB without any additional configuration.
|
||||
|
||||
|
||||
### Raspberry Pi 3/4
|
||||
|
||||
By default, the Raspberry Pi limits the amount of memory available to the GPU. In order to use ffmpeg hardware acceleration, you must increase the available memory by setting `gpu_mem` to the maximum recommended value in `config.txt` as described in the [official docs](https://www.raspberrypi.org/documentation/computers/config_txt.html#memory-options).
|
||||
@@ -81,22 +97,7 @@ Additionally, the USB Coral draws a considerable amount of power. If using any o
|
||||
|
||||
## Docker
|
||||
|
||||
Running in Docker with compose is the recommended install method:
|
||||
|
||||
:::note
|
||||
|
||||
The following officially supported builds are available:
|
||||
|
||||
`ghcr.io/blakeblackshear/frigate:stable` - Standard Frigate build for amd64 & RPi Optimized Frigate build for arm64
|
||||
`ghcr.io/blakeblackshear/frigate:stable-standard-arm64` - Standard Frigate build for arm64
|
||||
`ghcr.io/blakeblackshear/frigate:stable-tensorrt` - Frigate build specific for amd64 devices running an nvidia GPU
|
||||
|
||||
The following community supported builds are available:
|
||||
|
||||
`ghcr.io/blakeblackshear/frigate:stable-tensorrt-jp5` - Frigate build optimized for nvidia Jetson devices running Jetpack 5
|
||||
`ghcr.io/blakeblackshear/frigate:stable-tensorrt-jp4` - Frigate build optimized for nvidia Jetson devices running Jetpack 4.6
|
||||
|
||||
:::
|
||||
Running in Docker with compose is the recommended install method.
|
||||
|
||||
```yaml
|
||||
version: "3.9"
|
||||
@@ -108,9 +109,10 @@ services:
|
||||
image: ghcr.io/blakeblackshear/frigate:stable
|
||||
shm_size: "64mb" # update for your cameras based on calculation above
|
||||
devices:
|
||||
- /dev/bus/usb:/dev/bus/usb # passes the USB Coral, needs to be modified for other versions
|
||||
- /dev/apex_0:/dev/apex_0 # passes a PCIe Coral, follow driver instructions here https://coral.ai/docs/m2/get-started/#2a-on-linux
|
||||
- /dev/dri/renderD128 # for intel hwaccel, needs to be updated for your hardware
|
||||
- /dev/bus/usb:/dev/bus/usb # Passes the USB Coral, needs to be modified for other versions
|
||||
- /dev/apex_0:/dev/apex_0 # Passes a PCIe Coral, follow driver instructions here https://coral.ai/docs/m2/get-started/#2a-on-linux
|
||||
- /dev/video11:/dev/video11 # For Raspberry Pi 4B
|
||||
- /dev/dri/renderD128:/dev/dri/renderD128 # For intel hwaccel, needs to be updated for your hardware
|
||||
volumes:
|
||||
- /etc/localtime:/etc/localtime:ro
|
||||
- /path/to/your/config:/config
|
||||
@@ -120,7 +122,8 @@ services:
|
||||
tmpfs:
|
||||
size: 1000000000
|
||||
ports:
|
||||
- "5000:5000"
|
||||
- "8080:8080"
|
||||
# - "5000:5000" # Internal unauthenticated access. Expose carefully.
|
||||
- "8554:8554" # RTSP feeds
|
||||
- "8555:8555/tcp" # WebRTC over tcp
|
||||
- "8555:8555/udp" # WebRTC over udp
|
||||
@@ -142,20 +145,37 @@ docker run -d \
|
||||
-v /path/to/your/config:/config \
|
||||
-v /etc/localtime:/etc/localtime:ro \
|
||||
-e FRIGATE_RTSP_PASSWORD='password' \
|
||||
-p 5000:5000 \
|
||||
-p 8080:8080 \
|
||||
-p 8554:8554 \
|
||||
-p 8555:8555/tcp \
|
||||
-p 8555:8555/udp \
|
||||
ghcr.io/blakeblackshear/frigate:stable
|
||||
```
|
||||
|
||||
The official docker image tags for the current stable version are:
|
||||
|
||||
- `stable` - Standard Frigate build for amd64 & RPi Optimized Frigate build for arm64
|
||||
- `stable-standard-arm64` - Standard Frigate build for arm64
|
||||
- `stable-tensorrt` - Frigate build specific for amd64 devices running an nvidia GPU
|
||||
|
||||
The community supported docker image tags for the current stable version are:
|
||||
|
||||
- `stable-tensorrt-jp5` - Frigate build optimized for nvidia Jetson devices running Jetpack 5
|
||||
- `stable-tensorrt-jp4` - Frigate build optimized for nvidia Jetson devices running Jetpack 4.6
|
||||
- `stable-rk` - Frigate build for SBCs with Rockchip SoC
|
||||
- `stable-rocm` - Frigate build for [AMD GPUs and iGPUs](../configuration/object_detectors.md#amdrocm-gpu-detector), all drivers
|
||||
- `stable-rocm-gfx900` - AMD gfx900 driver only
|
||||
- `stable-rocm-gfx1030` - AMD gfx1030 driver only
|
||||
- `stable-rocm-gfx1100` - AMD gfx1100 driver only
|
||||
|
||||
## Home Assistant Addon
|
||||
|
||||
:::caution
|
||||
:::warning
|
||||
|
||||
As of HomeAssistant OS 10.2 and Core 2023.6 defining separate network storage for media is supported.
|
||||
|
||||
There are important limitations in Home Assistant Operating System to be aware of:
|
||||
|
||||
- Separate local storage for media is not yet supported by Home Assistant
|
||||
- AMD GPUs are not supported because HA OS does not include the mesa driver.
|
||||
- Nvidia GPUs are not supported because addons do not support the nvidia runtime.
|
||||
@@ -198,19 +218,27 @@ To install make sure you have the [community app plugin here](https://forums.unr
|
||||
|
||||
## Proxmox
|
||||
|
||||
It is recommended to run Frigate in LXC for maximum performance. See [this discussion](https://github.com/blakeblackshear/frigate/discussions/1111) for more information.
|
||||
It is recommended to run Frigate in LXC, rather than in a VM, for maximum performance. The setup can be complex so be prepared to read the Proxmox and LXC documentation. Suggestions include:
|
||||
|
||||
- For Intel-based hardware acceleration, to allow access to the `/dev/dri/renderD128` device with major number 226 and minor number 128, add the following lines to the `/etc/pve/lxc/<id>.conf` LXC configuration:
|
||||
- `lxc.cgroup2.devices.allow: c 226:128 rwm`
|
||||
- `lxc.mount.entry: /dev/dri/renderD128 dev/dri/renderD128 none bind,optional,create=file`
|
||||
- The LXC configuration will likely also need `features: fuse=1,nesting=1`. This allows running a Docker container in an LXC container (`nesting`) and prevents duplicated files and wasted storage (`fuse`).
|
||||
- Successfully passing hardware devices through multiple levels of containerization (LXC then Docker) can be difficult. Many people make devices like `/dev/dri/renderD128` world-readable in the host or run Frigate in a privileged LXC container.
|
||||
- The virtualization layer often introduces a sizable amount of overhead for communication with Coral devices, but [not in all circumstances](https://github.com/blakeblackshear/frigate/discussions/1837).
|
||||
|
||||
See the [Proxmox LXC discussion](https://github.com/blakeblackshear/frigate/discussions/5773) for more general information.
|
||||
|
||||
## ESXi
|
||||
|
||||
For details on running Frigate using ESXi, please see the instructions [here](https://williamlam.com/2023/05/frigate-nvr-with-coral-tpu-igpu-passthrough-using-esxi-on-intel-nuc.html).
|
||||
|
||||
If you're running Frigate on a rack mounted server and want to passthough the Google Coral, [read this.](https://github.com/blakeblackshear/frigate/issues/305)
|
||||
If you're running Frigate on a rack mounted server and want to passthrough the Google Coral, [read this.](https://github.com/blakeblackshear/frigate/issues/305)
|
||||
|
||||
## Synology NAS on DSM 7
|
||||
|
||||
These settings were tested on DSM 7.1.1-42962 Update 4
|
||||
|
||||
|
||||
**General:**
|
||||
|
||||
The `Execute container using high privilege` option needs to be enabled in order to give the frigate container the elevated privileges it may need.
|
||||
@@ -219,14 +247,12 @@ The `Enable auto-restart` option can be enabled if you want the container to aut
|
||||
|
||||
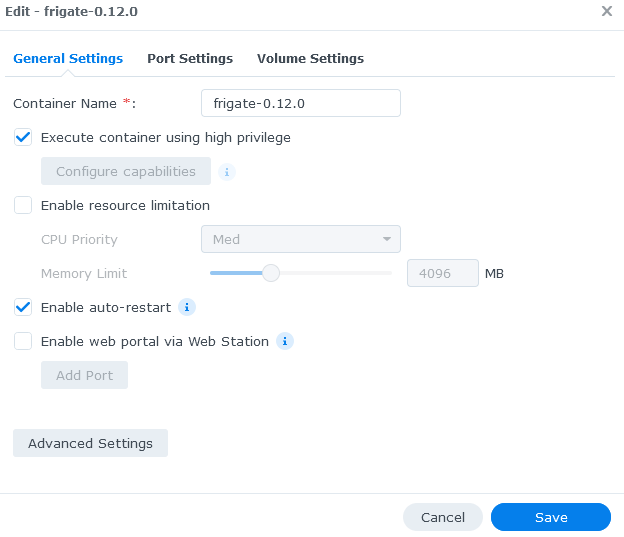
|
||||
|
||||
|
||||
**Advanced Settings:**
|
||||
|
||||
If you want to use the password template feature, you should add the "FRIGATE_RTSP_PASSWORD" environment variable and set it to your preferred password under advanced settings. The rest of the environment variables should be left as default for now.
|
||||
|
||||
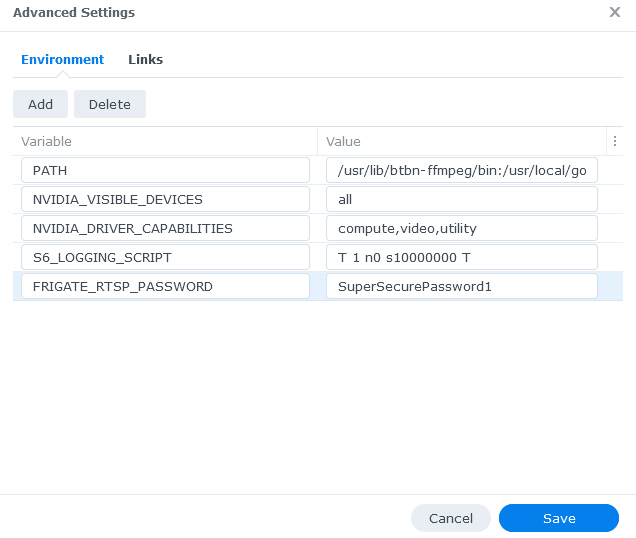
|
||||
|
||||
|
||||
**Port Settings:**
|
||||
|
||||
The network mode should be set to `bridge`. You need to map the default frigate container ports to your local Synology NAS ports that you want to use to access Frigate.
|
||||
@@ -235,12 +261,11 @@ There may be other services running on your NAS that are using the same ports th
|
||||
|
||||
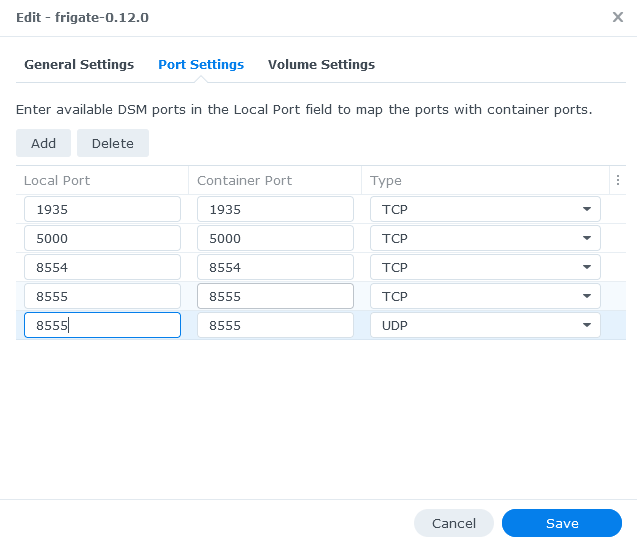
|
||||
|
||||
|
||||
**Volume Settings:**
|
||||
|
||||
You need to configure 2 paths:
|
||||
|
||||
- The location of your config file in yaml format, this needs to be file and you need to go to the location of where your config.yml is located, this will be different depending on your NAS folder structure e.g. `/docker/frigate/config/config.yml` will mount to `/config/config.yml` within the container.
|
||||
- The location of your config directory which will be different depending on your NAS folder structure e.g. `/docker/frigate/config` will mount to `/config` within the container.
|
||||
- The location on your NAS where the recordings will be saved this needs to be a folder e.g. `/docker/volumes/frigate-0-media`
|
||||
|
||||
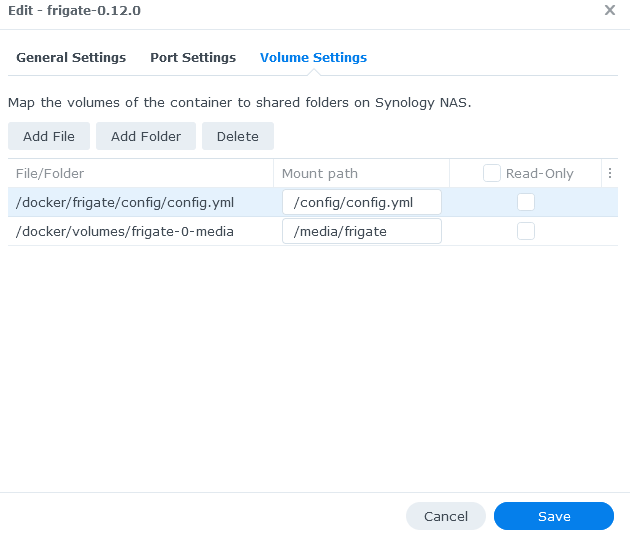
|
||||
@@ -249,14 +274,15 @@ You need to configure 2 paths:
|
||||
|
||||
These instructions were tested on a QNAP with an Intel J3455 CPU and 16G RAM, running QTS 4.5.4.2117.
|
||||
|
||||
QNAP has a graphic tool named Container Station to install and manage docker containers. However, there are two limitations with Container Station that make it unsuitable to install Frigate:
|
||||
QNAP has a graphic tool named Container Station to install and manage docker containers. However, there are two limitations with Container Station that make it unsuitable to install Frigate:
|
||||
|
||||
1. Container Station does not incorporate GitHub Container Registry (ghcr), which hosts Frigate docker image version 0.12.0 and above.
|
||||
2. Container Station uses default 64 Mb shared memory size (shm-size), and does not have a mechanism to adjust it. Frigate requires a larger shm-size to be able to work properly with more than two high resolution cameras.
|
||||
2. Container Station uses default 64 Mb shared memory size (shm-size), and does not have a mechanism to adjust it. Frigate requires a larger shm-size to be able to work properly with more than two high resolution cameras.
|
||||
|
||||
Because of above limitations, the installation has to be done from command line. Here are the steps:
|
||||
Because of above limitations, the installation has to be done from command line. Here are the steps:
|
||||
|
||||
**Preparation**
|
||||
|
||||
1. Install Container Station from QNAP App Center if it is not installed.
|
||||
2. Enable ssh on your QNAP (please do an Internet search on how to do this).
|
||||
3. Prepare Frigate config file, name it `config.yml`.
|
||||
@@ -267,7 +293,8 @@ Because of above limitations, the installation has to be done from command line.
|
||||
**Installation**
|
||||
|
||||
Run the following commands to install Frigate (using `stable` version as example):
|
||||
```bash
|
||||
|
||||
```shell
|
||||
# Download Frigate image
|
||||
docker pull ghcr.io/blakeblackshear/frigate:stable
|
||||
# Create directory to host Frigate config file on QNAP file system.
|
||||
@@ -276,8 +303,8 @@ mkdir -p /share/Container/frigate/config
|
||||
# Copy the config file prepared in step 2 into the newly created config directory.
|
||||
cp path/to/your/config/file /share/Container/frigate/config
|
||||
# Create directory to host Frigate media files on QNAP file system.
|
||||
# (if you have a surveilliance disk, create media directory on the surveilliance disk.
|
||||
# Example command assumes share_vol2 is the surveilliance drive
|
||||
# (if you have a surveillance disk, create media directory on the surveillance disk.
|
||||
# Example command assumes share_vol2 is the surveillance drive
|
||||
mkdir -p /share/share_vol2/frigate/media
|
||||
# Create Frigate docker container. Replace shm-size value with the value from preparation step 3.
|
||||
# Also replace the time zone value for 'TZ' in the sample command.
|
||||
@@ -294,8 +321,7 @@ docker run \
|
||||
--network=bridge \
|
||||
--privileged \
|
||||
--workdir=/opt/frigate \
|
||||
-p 1935:1935 \
|
||||
-p 5000:5000 \
|
||||
-p 8080:8080 \
|
||||
-p 8554:8554 \
|
||||
-p 8555:8555 \
|
||||
-p 8555:8555/udp \
|
||||
@@ -308,6 +334,4 @@ docker run \
|
||||
ghcr.io/blakeblackshear/frigate:stable
|
||||
```
|
||||
|
||||
Log into QNAP, open Container Station. Frigate docker container should be listed under 'Overview' and running. Visit Frigate Web UI by clicking Frigate docker, and then clicking the URL shown at the top of the detail page.
|
||||
|
||||
|
||||
Log into QNAP, open Container Station. Frigate docker container should be listed under 'Overview' and running. Visit Frigate Web UI by clicking Frigate docker, and then clicking the URL shown at the top of the detail page.
|
||||
|
||||
67
docs/docs/frigate/video_pipeline.md
Normal file
67
docs/docs/frigate/video_pipeline.md
Normal file
@@ -0,0 +1,67 @@
|
||||
---
|
||||
id: video_pipeline
|
||||
title: Video pipeline
|
||||
---
|
||||
|
||||
Frigate uses a sophisticated video pipeline that starts with the camera feed and progressively applies transformations to it (e.g. decoding, motion detection, etc.).
|
||||
|
||||
This guide provides an overview to help users understand some of the key Frigate concepts.
|
||||
|
||||
## Overview
|
||||
|
||||
At a high level, there are five processing steps that could be applied to a camera feed
|
||||
|
||||
```mermaid
|
||||
%%{init: {"themeVariables": {"edgeLabelBackground": "transparent"}}}%%
|
||||
|
||||
flowchart LR
|
||||
Feed(Feed\nacquisition) --> Decode(Video\ndecoding)
|
||||
Decode --> Motion(Motion\ndetection)
|
||||
Motion --> Object(Object\ndetection)
|
||||
Feed --> Recording(Recording\nand\nvisualization)
|
||||
Motion --> Recording
|
||||
Object --> Recording
|
||||
```
|
||||
|
||||
As the diagram shows, all feeds first need to be acquired. Depending on the data source, it may be as simple as using FFmpeg to connect to an RTSP source via TCP or something more involved like connecting to an Apple Homekit camera using go2rtc. A single camera can produce a main (i.e. high resolution) and a sub (i.e. lower resolution) video feed.
|
||||
|
||||
Typically, the sub-feed will be decoded to produce full-frame images. As part of this process, the resolution may be downscaled and an image sampling frequency may be imposed (e.g. keep 5 frames per second).
|
||||
|
||||
These frames will then be compared over time to detect movement areas (a.k.a. motion boxes). These motion boxes are combined into motion regions and are analyzed by a machine learning model to detect known objects. Finally, the snapshot and recording retention config will decide what video clips and events should be saved.
|
||||
|
||||
## Detailed view of the video pipeline
|
||||
|
||||
The following diagram adds a lot more detail than the simple view explained before. The goal is to show the detailed data paths between the processing steps.
|
||||
|
||||
```mermaid
|
||||
%%{init: {"themeVariables": {"edgeLabelBackground": "transparent"}}}%%
|
||||
|
||||
flowchart TD
|
||||
RecStore[(Recording\nstore)]
|
||||
SnapStore[(Snapshot\nstore)]
|
||||
|
||||
subgraph Acquisition
|
||||
Cam["Camera"] -->|FFmpeg supported| Stream
|
||||
Cam -->|"Other streaming\nprotocols"| go2rtc
|
||||
go2rtc("go2rtc") --> Stream
|
||||
Stream[Capture main and\nsub streams] --> |detect stream|Decode(Decode and\ndownscale)
|
||||
end
|
||||
subgraph Motion
|
||||
Decode --> MotionM(Apply\nmotion masks)
|
||||
MotionM --> MotionD(Motion\ndetection)
|
||||
end
|
||||
subgraph Detection
|
||||
MotionD --> |motion regions| ObjectD(Object detection)
|
||||
Decode --> ObjectD
|
||||
ObjectD --> ObjectFilter(Apply object filters & zones)
|
||||
ObjectFilter --> ObjectZ(Track objects)
|
||||
end
|
||||
Decode --> |decoded frames|Birdseye
|
||||
MotionD --> |motion event|Birdseye
|
||||
ObjectZ --> |object event|Birdseye
|
||||
|
||||
MotionD --> |"video segments\n(retain motion)"|RecStore
|
||||
ObjectZ --> |detection clip|RecStore
|
||||
Stream -->|"video segments\n(retain all)"| RecStore
|
||||
ObjectZ --> |detection snapshot|SnapStore
|
||||
```
|
||||
@@ -3,15 +3,17 @@ id: configuring_go2rtc
|
||||
title: Configuring go2rtc
|
||||
---
|
||||
|
||||
# Configuring go2rtc
|
||||
|
||||
Use of the bundled go2rtc is optional. You can still configure FFmpeg to connect directly to your cameras. However, adding go2rtc to your configuration is required for the following features:
|
||||
|
||||
- WebRTC or MSE for live viewing with higher resolutions and frame rates than the jsmpeg stream which is limited to the detect stream
|
||||
- Live stream support for cameras in Home Assistant Integration
|
||||
- RTSP (instead of RTMP) relay for use with other consumers to reduce the number of connections to your camera streams
|
||||
- RTSP relay for use with other consumers to reduce the number of connections to your camera streams
|
||||
|
||||
# Setup a go2rtc stream
|
||||
|
||||
First, you will want to configure go2rtc to connect to your camera stream by adding the stream you want to use for live view in your Frigate config file. If you set the stream name under go2rtc to match the name of your camera, it will automatically be mapped and you will get additional live view options for the camera. Avoid changing any other parts of your config at this step. Note that go2rtc supports [many different stream types](https://github.com/AlexxIT/go2rtc/tree/v1.8.1#module-streams), not just rtsp.
|
||||
First, you will want to configure go2rtc to connect to your camera stream by adding the stream you want to use for live view in your Frigate config file. If you set the stream name under go2rtc to match the name of your camera, it will automatically be mapped and you will get additional live view options for the camera. Avoid changing any other parts of your config at this step. Note that go2rtc supports [many different stream types](https://github.com/AlexxIT/go2rtc/tree/v1.9.2#module-streams), not just rtsp.
|
||||
|
||||
```yaml
|
||||
go2rtc:
|
||||
@@ -24,7 +26,7 @@ The easiest live view to get working is MSE. After adding this to the config, re
|
||||
|
||||
### What if my video doesn't play?
|
||||
|
||||
If you are unable to see your video feed, first check the go2rtc logs in the Frigate UI under Logs in the sidebar. If go2rtc is having difficulty connecting to your camera, you should see some error messages in the log. If you do not see any errors, then the video codec of the stream may not be supported in your browser. If your camera stream is set to H265, try switching to H264. You can see more information about [video codec compatibility](https://github.com/AlexxIT/go2rtc/tree/v1.8.1#codecs-madness) in the go2rtc documentation. If you are not able to switch your camera settings from H265 to H264 or your stream is a different format such as MJPEG, you can use go2rtc to re-encode the video using the [FFmpeg parameters](https://github.com/AlexxIT/go2rtc/tree/v1.8.1#source-ffmpeg). It supports rotating and resizing video feeds and hardware acceleration. Keep in mind that transcoding video from one format to another is a resource intensive task and you may be better off using the built-in jsmpeg view. Here is an example of a config that will re-encode the stream to H264 without hardware acceleration:
|
||||
If you are unable to see your video feed, first check the go2rtc logs in the Frigate UI under Logs in the sidebar. If go2rtc is having difficulty connecting to your camera, you should see some error messages in the log. If you do not see any errors, then the video codec of the stream may not be supported in your browser. If your camera stream is set to H265, try switching to H264. You can see more information about [video codec compatibility](https://github.com/AlexxIT/go2rtc/tree/v1.9.2#codecs-madness) in the go2rtc documentation. If you are not able to switch your camera settings from H265 to H264 or your stream is a different format such as MJPEG, you can use go2rtc to re-encode the video using the [FFmpeg parameters](https://github.com/AlexxIT/go2rtc/tree/v1.9.2#source-ffmpeg). It supports rotating and resizing video feeds and hardware acceleration. Keep in mind that transcoding video from one format to another is a resource intensive task and you may be better off using the built-in jsmpeg view. Here is an example of a config that will re-encode the stream to H264 without hardware acceleration:
|
||||
|
||||
```yaml
|
||||
go2rtc:
|
||||
@@ -72,7 +74,7 @@ go2rtc:
|
||||
- "ffmpeg:rtsp://user:password@10.0.10.10:554/cam/realmonitor?channel=1&subtype=2#video=copy#audio=copy#audio=aac"
|
||||
```
|
||||
|
||||
:::caution
|
||||
:::warning
|
||||
|
||||
To access the go2rtc stream externally when utilizing the Frigate Add-On (for instance through VLC), you must first enable the RTSP Restream port. You can do this by visiting the Frigate Add-On configuration page within Home Assistant and revealing the hidden options under the "Show disabled ports" section.
|
||||
|
||||
|
||||
@@ -3,7 +3,145 @@ id: getting_started
|
||||
title: Getting started
|
||||
---
|
||||
|
||||
This guide walks through the steps to build a configuration file for Frigate. It assumes that you already have an environment setup as described in [Installation](../frigate/installation.md). You should also configure your cameras according to the [camera setup guide](/frigate/camera_setup). Pay particular attention to the section on choosing a detect resolution.
|
||||
# Getting Started
|
||||
|
||||
## Setting up hardware
|
||||
|
||||
This section guides you through setting up a server with Debian Bookworm and Docker. If you already have an environment with Linux and Docker installed, you can continue to [Installing Frigate](#installing-frigate) below.
|
||||
|
||||
### Install Debian 12 (Bookworm)
|
||||
|
||||
There are many guides on how to install Debian Server, so this will be an abbreviated guide. Connect a temporary monitor and keyboard to your device so you can install a minimal server without a desktop environment.
|
||||
|
||||
#### Prepare installation media
|
||||
|
||||
1. Download the small installation image from the [Debian website](https://www.debian.org/distrib/netinst)
|
||||
1. Flash the ISO to a USB device (popular tool is [balena Etcher](https://etcher.balena.io/))
|
||||
1. Boot your device from USB
|
||||
|
||||
#### Install and setup Debian for remote access
|
||||
|
||||
1. Ensure your device is connected to the network so updates and software options can be installed
|
||||
1. Choose the non-graphical install option if you don't have a mouse connected, but either install method works fine
|
||||
1. You will be prompted to set the root user password and create a user with a password
|
||||
1. Install the minimum software. Fewer dependencies result in less maintenance.
|
||||
1. Uncheck "Debian desktop environment" and "GNOME"
|
||||
1. Check "SSH server"
|
||||
1. Keep "standard system utilities" checked
|
||||
1. After reboot, login as root at the command prompt to add user to sudoers
|
||||
1. Install sudo
|
||||
```bash
|
||||
apt update && apt install -y sudo
|
||||
```
|
||||
1. Add the user you created to the sudo group (change `blake` to your own user)
|
||||
```bash
|
||||
usermod -aG sudo blake
|
||||
```
|
||||
1. Shutdown by running `poweroff`
|
||||
|
||||
At this point, you can install the device in a permanent location. The remaining steps can be performed via SSH from another device. If you don't have an SSH client, you can install one of the options listed in the [Visual Studio Code documentation](https://code.visualstudio.com/docs/remote/troubleshooting#_installing-a-supported-ssh-client).
|
||||
|
||||
#### Finish setup via SSH
|
||||
|
||||
1. Connect via SSH and login with your non-root user created during install
|
||||
1. Setup passwordless sudo so you don't have to type your password for each sudo command (change `blake` in the command below to your user)
|
||||
|
||||
```bash
|
||||
echo 'blake ALL=(ALL) NOPASSWD:ALL' | sudo tee /etc/sudoers.d/user
|
||||
```
|
||||
|
||||
1. Logout and login again to activate passwordless sudo
|
||||
1. Setup automatic security updates for the OS (optional)
|
||||
1. Ensure everything is up to date by running
|
||||
```bash
|
||||
sudo apt update && sudo apt upgrade -y
|
||||
```
|
||||
1. Install unattended upgrades
|
||||
```bash
|
||||
sudo apt install -y unattended-upgrades
|
||||
echo unattended-upgrades unattended-upgrades/enable_auto_updates boolean true | sudo debconf-set-selections
|
||||
sudo dpkg-reconfigure -f noninteractive unattended-upgrades
|
||||
```
|
||||
|
||||
Now you have a minimal Debian server that requires very little maintenance.
|
||||
|
||||
### Install Docker
|
||||
|
||||
1. Install Docker Engine (not Docker Desktop) using the [official docs](https://docs.docker.com/engine/install/debian/)
|
||||
1. Specifically, follow the steps in the [Install using the apt repository](https://docs.docker.com/engine/install/debian/#install-using-the-repository) section
|
||||
2. Add your user to the docker group as described in the [Linux postinstall steps](https://docs.docker.com/engine/install/linux-postinstall/)
|
||||
|
||||
## Installing Frigate
|
||||
|
||||
This section shows how to create a minimal directory structure for a Docker installation on Debian. If you have installed Frigate as a Home Assistant addon or another way, you can continue to [Configuring Frigate](#configuring-frigate).
|
||||
|
||||
### Setup directories
|
||||
|
||||
Frigate requires a valid config file to start. The following directory structure is the bare minimum to get started. Once Frigate is running, you can use the built-in config editor which supports config validation.
|
||||
|
||||
```
|
||||
.
|
||||
├── docker-compose.yml
|
||||
├── config/
|
||||
│ └── config.yml
|
||||
└── storage/
|
||||
```
|
||||
|
||||
This will create the above structure:
|
||||
|
||||
```bash
|
||||
mkdir storage config && touch docker-compose.yml config/config.yml
|
||||
```
|
||||
|
||||
If you are setting up Frigate on a Linux device via SSH, you can use [nano](https://itsfoss.com/nano-editor-guide/) to edit the following files. If you prefer to edit remote files with a full editor instead of a terminal, I recommend using [Visual Studio Code](https://code.visualstudio.com/) with the [Remote SSH extension](https://code.visualstudio.com/docs/remote/ssh-tutorial).
|
||||
|
||||
:::note
|
||||
|
||||
This `docker-compose.yml` file is just a starter for amd64 devices. You will need to customize it for your setup as detailed in the [Installation docs](/frigate/installation#docker).
|
||||
|
||||
:::
|
||||
`docker-compose.yml`
|
||||
|
||||
```yaml
|
||||
version: "3.9"
|
||||
services:
|
||||
frigate:
|
||||
container_name: frigate
|
||||
restart: unless-stopped
|
||||
image: ghcr.io/blakeblackshear/frigate:stable
|
||||
volumes:
|
||||
- ./config:/config
|
||||
- ./storage:/media/frigate
|
||||
- type: tmpfs # Optional: 1GB of memory, reduces SSD/SD Card wear
|
||||
target: /tmp/cache
|
||||
tmpfs:
|
||||
size: 1000000000
|
||||
ports:
|
||||
- "8080:8080"
|
||||
- "8554:8554" # RTSP feeds
|
||||
```
|
||||
|
||||
`config.yml`
|
||||
|
||||
```yaml
|
||||
mqtt:
|
||||
enabled: False
|
||||
|
||||
cameras:
|
||||
dummy_camera: # <--- this will be changed to your actual camera later
|
||||
enabled: False
|
||||
ffmpeg:
|
||||
inputs:
|
||||
- path: rtsp://127.0.0.1:554/rtsp
|
||||
roles:
|
||||
- detect
|
||||
```
|
||||
|
||||
Now you should be able to start Frigate by running `docker compose up -d` from within the folder containing `docker-compose.yml`. On startup, an admin user and password will be created and outputted in the logs. You can see this by running `docker logs frigate`. Frigate should now be accessible at `server_ip:8080` where you can login with the `admin` user and finish the configuration using the built-in configuration editor.
|
||||
|
||||
## Configuring Frigate
|
||||
|
||||
This section assumes that you already have an environment setup as described in [Installation](../frigate/installation.md). You should also configure your cameras according to the [camera setup guide](/frigate/camera_setup). Pay particular attention to the section on choosing a detect resolution.
|
||||
|
||||
### Step 1: Add a detect stream
|
||||
|
||||
@@ -15,6 +153,7 @@ mqtt:
|
||||
|
||||
cameras:
|
||||
name_of_your_camera: # <------ Name the camera
|
||||
enabled: True
|
||||
ffmpeg:
|
||||
inputs:
|
||||
- path: rtsp://10.0.10.10:554/rtsp # <----- The stream you want to use for detection
|
||||
@@ -26,7 +165,7 @@ cameras:
|
||||
|
||||
### Step 2: Start Frigate
|
||||
|
||||
At this point you should be able to start Frigate and see the the video feed in the UI.
|
||||
At this point you should be able to start Frigate and see the video feed in the UI.
|
||||
|
||||
If you get an error image from the camera, this means ffmpeg was not able to get the video feed from your camera. Check the logs for error messages from ffmpeg. The default ffmpeg arguments are designed to work with H264 RTSP cameras that support TCP connections.
|
||||
|
||||
@@ -36,7 +175,21 @@ FFmpeg arguments for other types of cameras can be found [here](../configuration
|
||||
|
||||
Now that you have a working camera configuration, you want to setup hardware acceleration to minimize the CPU required to decode your video streams. See the [hardware acceleration](../configuration/hardware_acceleration.md) config reference for examples applicable to your hardware.
|
||||
|
||||
Here is an example configuration with hardware acceleration configured for Intel processors with an integrated GPU using the [preset](../configuration/ffmpeg_presets.md):
|
||||
Here is an example configuration with hardware acceleration configured to work with most Intel processors with an integrated GPU using the [preset](../configuration/ffmpeg_presets.md):
|
||||
|
||||
`docker-compose.yml` (after modifying, you will need to run `docker compose up -d` to apply changes)
|
||||
|
||||
```yaml
|
||||
version: "3.9"
|
||||
services:
|
||||
frigate:
|
||||
...
|
||||
devices:
|
||||
- /dev/dri/renderD128 # for intel hwaccel, needs to be updated for your hardware
|
||||
...
|
||||
```
|
||||
|
||||
`config.yml`
|
||||
|
||||
```yaml
|
||||
mqtt: ...
|
||||
@@ -53,6 +206,19 @@ cameras:
|
||||
|
||||
By default, Frigate will use a single CPU detector. If you have a USB Coral, you will need to add a detectors section to your config.
|
||||
|
||||
`docker-compose.yml` (after modifying, you will need to run `docker compose up -d` to apply changes)
|
||||
|
||||
```yaml
|
||||
version: "3.9"
|
||||
services:
|
||||
frigate:
|
||||
...
|
||||
devices:
|
||||
- /dev/bus/usb:/dev/bus/usb # passes the USB Coral, needs to be modified for other versions
|
||||
- /dev/apex_0:/dev/apex_0 # passes a PCIe Coral, follow driver instructions here https://coral.ai/docs/m2/get-started/#2a-on-linux
|
||||
...
|
||||
```
|
||||
|
||||
```yaml
|
||||
mqtt: ...
|
||||
|
||||
@@ -71,7 +237,7 @@ cameras:
|
||||
|
||||
More details on available detectors can be found [here](../configuration/object_detectors.md).
|
||||
|
||||
Restart Frigate and you should start seeing detections for `person`. If you want to track other objects, they will need to be added according to the [configuration file reference](../configuration/index.md#full-configuration-reference).
|
||||
Restart Frigate and you should start seeing detections for `person`. If you want to track other objects, they will need to be added according to the [configuration file reference](../configuration/reference.md).
|
||||
|
||||
### Step 5: Setup motion masks
|
||||
|
||||
@@ -79,7 +245,7 @@ Now that you have optimized your configuration for decoding the video stream, yo
|
||||
|
||||
Now that you know where you need to mask, use the "Mask & Zone creator" in the options pane to generate the coordinates needed for your config file. More information about masks can be found [here](../configuration/masks.md).
|
||||
|
||||
:::caution
|
||||
:::warning
|
||||
|
||||
Note that motion masks should not be used to mark out areas where you do not want objects to be detected or to reduce false positives. They do not alter the image sent to object detection, so you can still get events and detections in areas with motion masks. These only prevent motion in these areas from initiating object detection.
|
||||
|
||||
@@ -139,7 +305,7 @@ cameras:
|
||||
|
||||
If you don't have separate streams for detect and record, you would just add the record role to the list on the first input.
|
||||
|
||||
By default, Frigate will retain video of all events for 10 days. The full set of options for recording can be found [here](../configuration/index.md#full-configuration-reference).
|
||||
By default, Frigate will retain video of all events for 10 days. The full set of options for recording can be found [here](../configuration/reference.md).
|
||||
|
||||
#### Snapshots
|
||||
|
||||
@@ -159,11 +325,17 @@ cameras:
|
||||
motion: ...
|
||||
```
|
||||
|
||||
By default, Frigate will retain snapshots of all events for 10 days. The full set of options for snapshots can be found [here](../configuration/index.md#full-configuration-reference).
|
||||
By default, Frigate will retain snapshots of all events for 10 days. The full set of options for snapshots can be found [here](../configuration/reference.md).
|
||||
|
||||
### Step 7: Follow up guides
|
||||
### Step 7: Complete config
|
||||
|
||||
Now that you have a working install, you can use the following guides for additional features:
|
||||
At this point you have a complete config with basic functionality. You can see the [full config reference](../configuration/reference.md) for a complete list of configuration options.
|
||||
|
||||
1. [Configuring go2rtc](configuring_go2rtc) - Additional live view options and RTSP relay
|
||||
### Follow up
|
||||
|
||||
Now that you have a working install, you can use the following documentation for additional features:
|
||||
|
||||
1. [Configuring go2rtc](configuring_go2rtc.md) - Additional live view options and RTSP relay
|
||||
2. [Home Assistant Integration](../integrations/home-assistant.md) - Integrate with Home Assistant
|
||||
3. [Masks](../configuration/masks.md)
|
||||
4. [Zones](../configuration/zones.md)
|
||||
|
||||
@@ -1,21 +1,22 @@
|
||||
---
|
||||
id: ha_network_storage
|
||||
title: HA Network Storage
|
||||
title: Home Assistant network storage
|
||||
---
|
||||
|
||||
As of HomeAsisstant Core 2023.6, Network Mounted Storage is supported for addons.
|
||||
As of Home Assistant Core 2023.6, Network Mounted Storage is supported for addons.
|
||||
|
||||
## Setting Up Remote Storage For Frigate
|
||||
|
||||
### Prerequisites
|
||||
|
||||
- HA Core 2023.6 or newer is installed
|
||||
- Running HA OS 10.2 or newer OR Running Supervised with latest os-agent installed (this is required for superivsed install)
|
||||
- Running HA OS 10.2 or newer OR Running Supervised with latest os-agent installed (this is required for supervised install)
|
||||
|
||||
### Initial Setup
|
||||
|
||||
1. Stop the Frigate addon
|
||||
2. Update your [config](configuration/index.md) so the DB is stored in the /config directory by adding:
|
||||
|
||||
```yaml
|
||||
database:
|
||||
path: /config/frigate.db
|
||||
|
||||
@@ -13,7 +13,7 @@ The suggested steps are:
|
||||
- **Encrypt** content from the proxy webserver by installing SSL (such as with [Let's Encrypt](https://letsencrypt.org/)). Note that SSL is then not required on your Frigate webserver as the proxy encrypts all requests for you
|
||||
- **Restrict** access to your Frigate instance at the proxy using, for example, password authentication
|
||||
|
||||
:::caution
|
||||
:::warning
|
||||
A reverse proxy can be used to secure access to an internal webserver but the user will be entirely reliant
|
||||
on the steps they have taken. You must ensure you are following security best practices.
|
||||
This page does not attempt to outline the specific steps needed to secure your internal website.
|
||||
@@ -38,20 +38,20 @@ Here we access Frigate via https://cctv.mydomain.co.uk
|
||||
ServerName cctv.mydomain.co.uk
|
||||
|
||||
ProxyPreserveHost On
|
||||
ProxyPass "/" "http://frigatepi.local:5000/"
|
||||
ProxyPassReverse "/" "http://frigatepi.local:5000/"
|
||||
ProxyPass "/" "http://frigatepi.local:8080/"
|
||||
ProxyPassReverse "/" "http://frigatepi.local:8080/"
|
||||
|
||||
ProxyPass /ws ws://frigatepi.local:5000/ws
|
||||
ProxyPassReverse /ws ws://frigatepi.local:5000/ws
|
||||
ProxyPass /ws ws://frigatepi.local:8080/ws
|
||||
ProxyPassReverse /ws ws://frigatepi.local:8080/ws
|
||||
|
||||
ProxyPass /live/ ws://frigatepi.local:5000/live/
|
||||
ProxyPassReverse /live/ ws://frigatepi.local:5000/live/
|
||||
ProxyPass /live/ ws://frigatepi.local:8080/live/
|
||||
ProxyPassReverse /live/ ws://frigatepi.local:8080/live/
|
||||
|
||||
RewriteEngine on
|
||||
RewriteCond %{HTTP:Upgrade} =websocket [NC]
|
||||
RewriteRule /(.*) ws://frigatepi.local:5000/$1 [P,L]
|
||||
RewriteRule /(.*) ws://frigatepi.local:8080/$1 [P,L]
|
||||
RewriteCond %{HTTP:Upgrade} !=websocket [NC]
|
||||
RewriteRule /(.*) http://frigatepi.local:5000/$1 [P,L]
|
||||
RewriteRule /(.*) http://frigatepi.local:8080/$1 [P,L]
|
||||
</VirtualHost>
|
||||
```
|
||||
|
||||
@@ -87,11 +87,11 @@ There are many ways to authenticate a website but a straightforward approach is
|
||||
|
||||
## Nginx Reverse Proxy
|
||||
|
||||
This method shows a working example for subdomain type reverse proxy with SSL enabled.
|
||||
This method shows a working example for subdomain type reverse proxy with SSL enabled.
|
||||
|
||||
### Setup server and port to reverse proxy
|
||||
|
||||
This is set in `$server` and `$port` this should match your ports you have exposed to your docker container. Optionally you listen on port `443` and enable `SSL`
|
||||
This is set in `$server` and `$port` this should match your ports you have exposed to your docker container. Optionally you listen on port `443` and enable `SSL`
|
||||
|
||||
```
|
||||
# ------------------------------------------------------------
|
||||
@@ -101,7 +101,7 @@ This is set in `$server` and `$port` this should match your ports you have expos
|
||||
server {
|
||||
set $forward_scheme http;
|
||||
set $server "192.168.100.2"; # FRIGATE SERVER LOCATION
|
||||
set $port 5000;
|
||||
set $port 8080;
|
||||
|
||||
listen 80;
|
||||
listen 443 ssl http2;
|
||||
@@ -112,7 +112,7 @@ server {
|
||||
|
||||
### Setup SSL (optional)
|
||||
|
||||
This section points to your SSL files, the example below shows locations to a default Lets Encrypt SSL certificate.
|
||||
This section points to your SSL files, the example below shows locations to a default Lets Encrypt SSL certificate.
|
||||
|
||||
```
|
||||
# Let's Encrypt SSL
|
||||
@@ -122,10 +122,9 @@ This section points to your SSL files, the example below shows locations to a de
|
||||
ssl_certificate_key /etc/letsencrypt/live/npm-1/privkey.pem;
|
||||
```
|
||||
|
||||
### Setup reverse proxy settings
|
||||
|
||||
### Setup reverse proxy settings
|
||||
|
||||
Thhe settings below enabled connection upgrade, sets up logging (optional) and proxies everything from the `/` context to the docker host and port specified earlier in the configuration
|
||||
The settings below enabled connection upgrade, sets up logging (optional) and proxies everything from the `/` context to the docker host and port specified earlier in the configuration
|
||||
|
||||
```
|
||||
proxy_set_header Upgrade $http_upgrade;
|
||||
|
||||
@@ -1,43 +0,0 @@
|
||||
---
|
||||
id: stationary_objects
|
||||
title: Avoiding stationary objects
|
||||
---
|
||||
|
||||
Many people use Frigate to detect cars entering their driveway, and they often run into an issue with repeated notifications or events of a parked car being repeatedly detected over the course of multiple days (for example if the car is lost at night and detected again the following morning).
|
||||
|
||||
You can use zones to restrict events and notifications to objects that have entered specific areas.
|
||||
|
||||
:::caution
|
||||
|
||||
It is not recommended to use masks to try and eliminate parked cars in your driveway. Masks are designed to prevent motion from triggering object detection and/or to indicate areas that are guaranteed false positives.
|
||||
|
||||
Frigate is designed to track objects as they move and over-masking can prevent it from knowing that an object in the current frame is the same as the previous frame. You want Frigate to detect objects everywhere and configure your events and alerts to be based on the location of the object with zones.
|
||||
|
||||
:::
|
||||
|
||||
:::info
|
||||
|
||||
Once a vehicle crosses the entrance into the parking area, that event will stay `In Progress` until it is no longer seen in the frame. Frigate is designed to have an event last as long as an object is visible in the frame, an event being `In Progress` does not mean the event is being constantly recorded. You can define the recording behavior by adjusting the [recording retention settings](../configuration/record.md).
|
||||
|
||||
:::
|
||||
|
||||
To only be notified of cars that enter your driveway from the street, you could create multiple zones that cover your driveway. For cars, you would only notify if `entered_zones` from the events MQTT topic has more than 1 zone.
|
||||
|
||||
See [this example](../configuration/zones.md#restricting-zones-to-specific-objects) from the Zones documentation to see how to restrict zones to certain object types.
|
||||
|
||||

|
||||
|
||||
To limit snapshots and events, you can list the zone for the entrance of your driveway under `required_zones` in your configuration file. Example below.
|
||||
|
||||
```yaml
|
||||
camera:
|
||||
record:
|
||||
events:
|
||||
required_zones:
|
||||
- zone_2
|
||||
zones:
|
||||
zone_1:
|
||||
coordinates: ... (parking area)
|
||||
zone_2:
|
||||
coordinates: ... (entrance to driveway)
|
||||
```
|
||||
@@ -5,45 +5,15 @@ title: HTTP API
|
||||
|
||||
A web server is available on port 5000 with the following endpoints.
|
||||
|
||||
### `GET /api/<camera_name>`
|
||||
## Management & Information
|
||||
|
||||
An mjpeg stream for debugging. Keep in mind the mjpeg endpoint is for debugging only and will put additional load on the system when in use.
|
||||
### `GET /api/config`
|
||||
|
||||
Accepts the following query string parameters:
|
||||
A json representation of your configuration
|
||||
|
||||
| param | Type | Description |
|
||||
| ----------- | ---- | ------------------------------------------------------------------ |
|
||||
| `fps` | int | Frame rate |
|
||||
| `h` | int | Height in pixels |
|
||||
| `bbox` | int | Show bounding boxes for detected objects (0 or 1) |
|
||||
| `timestamp` | int | Print the timestamp in the upper left (0 or 1) |
|
||||
| `zones` | int | Draw the zones on the image (0 or 1) |
|
||||
| `mask` | int | Overlay the mask on the image (0 or 1) |
|
||||
| `motion` | int | Draw blue boxes for areas with detected motion (0 or 1) |
|
||||
| `regions` | int | Draw green boxes for areas where object detection was run (0 or 1) |
|
||||
### `POST /api/restart`
|
||||
|
||||
You can access a higher resolution mjpeg stream by appending `h=height-in-pixels` to the endpoint. For example `http://localhost:5000/api/back?h=1080`. You can also increase the FPS by appending `fps=frame-rate` to the URL such as `http://localhost:5000/api/back?fps=10` or both with `?fps=10&h=1000`.
|
||||
|
||||
### `GET /api/<camera_name>/latest.jpg[?h=300]`
|
||||
|
||||
The most recent frame that Frigate has finished processing. It is a full resolution image by default.
|
||||
|
||||
Accepts the following query string parameters:
|
||||
|
||||
| param | Type | Description |
|
||||
| ----------- | ---- | ------------------------------------------------------------------ |
|
||||
| `h` | int | Height in pixels |
|
||||
| `bbox` | int | Show bounding boxes for detected objects (0 or 1) |
|
||||
| `timestamp` | int | Print the timestamp in the upper left (0 or 1) |
|
||||
| `zones` | int | Draw the zones on the image (0 or 1) |
|
||||
| `mask` | int | Overlay the mask on the image (0 or 1) |
|
||||
| `motion` | int | Draw blue boxes for areas with detected motion (0 or 1) |
|
||||
| `regions` | int | Draw green boxes for areas where object detection was run (0 or 1) |
|
||||
| `quality` | int | Jpeg encoding quality (0-100). Defaults to 70. |
|
||||
|
||||
Example parameters:
|
||||
|
||||
- `h=300`: resizes the image to 300 pixes tall
|
||||
Restarts Frigate process.
|
||||
|
||||
### `GET /api/stats`
|
||||
|
||||
@@ -54,35 +24,37 @@ Sample response:
|
||||
```json
|
||||
{
|
||||
/* Per Camera Stats */
|
||||
"back": {
|
||||
/***************
|
||||
* Frames per second being consumed from your camera. If this is higher
|
||||
* than it is supposed to be, you should set -r FPS in your input_args.
|
||||
* camera_fps = process_fps + skipped_fps
|
||||
***************/
|
||||
"camera_fps": 5.0,
|
||||
/***************
|
||||
* Number of times detection is run per second. This can be higher than
|
||||
* your camera FPS because Frigate often looks at the same frame multiple times
|
||||
* or in multiple locations
|
||||
***************/
|
||||
"detection_fps": 1.5,
|
||||
/***************
|
||||
* PID for the ffmpeg process that consumes this camera
|
||||
***************/
|
||||
"capture_pid": 27,
|
||||
/***************
|
||||
* PID for the process that runs detection for this camera
|
||||
***************/
|
||||
"pid": 34,
|
||||
/***************
|
||||
* Frames per second being processed by Frigate.
|
||||
***************/
|
||||
"process_fps": 5.1,
|
||||
/***************
|
||||
* Frames per second skip for processing by Frigate.
|
||||
***************/
|
||||
"skipped_fps": 0.0
|
||||
"cameras": {
|
||||
"back": {
|
||||
/***************
|
||||
* Frames per second being consumed from your camera. If this is higher
|
||||
* than it is supposed to be, you should set -r FPS in your input_args.
|
||||
* camera_fps = process_fps + skipped_fps
|
||||
***************/
|
||||
"camera_fps": 5.0,
|
||||
/***************
|
||||
* Number of times detection is run per second. This can be higher than
|
||||
* your camera FPS because Frigate often looks at the same frame multiple times
|
||||
* or in multiple locations
|
||||
***************/
|
||||
"detection_fps": 1.5,
|
||||
/***************
|
||||
* PID for the ffmpeg process that consumes this camera
|
||||
***************/
|
||||
"capture_pid": 27,
|
||||
/***************
|
||||
* PID for the process that runs detection for this camera
|
||||
***************/
|
||||
"pid": 34,
|
||||
/***************
|
||||
* Frames per second being processed by Frigate.
|
||||
***************/
|
||||
"process_fps": 5.1,
|
||||
/***************
|
||||
* Frames per second skip for processing by Frigate.
|
||||
***************/
|
||||
"skipped_fps": 0.0
|
||||
}
|
||||
},
|
||||
/***************
|
||||
* Sum of detection_fps across all cameras and detectors.
|
||||
@@ -139,18 +111,109 @@ Sample response:
|
||||
"mnt_type": "tmpfs"
|
||||
}
|
||||
}
|
||||
},
|
||||
"cpu_usages": {
|
||||
"pid": {
|
||||
"cmdline": "ffmpeg...",
|
||||
"cpu": "5.0",
|
||||
"cpu_average": "3.0",
|
||||
"mem": "0.5"
|
||||
}
|
||||
},
|
||||
"gpu_usages": {
|
||||
"gpu-type": {
|
||||
"gpu": "17%",
|
||||
"mem": "18%"
|
||||
}
|
||||
}
|
||||
}
|
||||
```
|
||||
|
||||
### `GET /api/config`
|
||||
|
||||
A json representation of your configuration
|
||||
|
||||
### `GET /api/version`
|
||||
|
||||
Version info
|
||||
|
||||
### `GET /api/ffprobe`
|
||||
|
||||
Get ffprobe output for camera feed paths.
|
||||
|
||||
| param | Type | Description |
|
||||
| ------- | ------ | ---------------------------------- |
|
||||
| `paths` | string | `,` separated list of camera paths |
|
||||
|
||||
### `GET /api/<camera_name>/ptz/info`
|
||||
|
||||
Get PTZ info for the camera.
|
||||
|
||||
## Camera Media
|
||||
|
||||
### `GET /api/<camera_name>`
|
||||
|
||||
An mjpeg stream for debugging. Keep in mind the mjpeg endpoint is for debugging only and will put additional load on the system when in use.
|
||||
|
||||
Accepts the following query string parameters:
|
||||
|
||||
| param | Type | Description |
|
||||
| ----------- | ---- | ------------------------------------------------------------------ |
|
||||
| `fps` | int | Frame rate |
|
||||
| `h` | int | Height in pixels |
|
||||
| `bbox` | int | Show bounding boxes for detected objects (0 or 1) |
|
||||
| `timestamp` | int | Print the timestamp in the upper left (0 or 1) |
|
||||
| `zones` | int | Draw the zones on the image (0 or 1) |
|
||||
| `mask` | int | Overlay the mask on the image (0 or 1) |
|
||||
| `motion` | int | Draw blue boxes for areas with detected motion (0 or 1) |
|
||||
| `regions` | int | Draw green boxes for areas where object detection was run (0 or 1) |
|
||||
|
||||
You can access a higher resolution mjpeg stream by appending `h=height-in-pixels` to the endpoint. For example `http://localhost:8080/api/back?h=1080`. You can also increase the FPS by appending `fps=frame-rate` to the URL such as `http://localhost:8080/api/back?fps=10` or both with `?fps=10&h=1000`.
|
||||
|
||||
### `GET /api/<camera_name>/latest.jpg[?h=300]`
|
||||
|
||||
The most recent frame that Frigate has finished processing. It is a full resolution image by default.
|
||||
|
||||
Accepts the following query string parameters:
|
||||
|
||||
| param | Type | Description |
|
||||
| ----------- | ---- | ------------------------------------------------------------------ |
|
||||
| `h` | int | Height in pixels |
|
||||
| `bbox` | int | Show bounding boxes for detected objects (0 or 1) |
|
||||
| `timestamp` | int | Print the timestamp in the upper left (0 or 1) |
|
||||
| `zones` | int | Draw the zones on the image (0 or 1) |
|
||||
| `mask` | int | Overlay the mask on the image (0 or 1) |
|
||||
| `motion` | int | Draw blue boxes for areas with detected motion (0 or 1) |
|
||||
| `regions` | int | Draw green boxes for areas where object detection was run (0 or 1) |
|
||||
| `quality` | int | Jpeg encoding quality (0-100). Defaults to 70. |
|
||||
|
||||
Example parameters:
|
||||
|
||||
- `h=300`: resizes the image to 300 pixels tall
|
||||
|
||||
### `GET /api/<camera_name>/<label>/thumbnail.jpg`
|
||||
|
||||
Returns the thumbnail from the latest event for the given camera and label combo. Using `any` as the label will return the latest thumbnail regardless of type.
|
||||
|
||||
### `GET /api/<camera_name>/<label>/clip.mp4`
|
||||
|
||||
Returns the clip from the latest event for the given camera and label combo. Using `any` as the label will return the latest clip regardless of type.
|
||||
|
||||
### `GET /api/<camera_name>/<label>/snapshot.jpg`
|
||||
|
||||
Returns the snapshot image from the latest event for the given camera and label combo. Using `any` as the label will return the latest thumbnail regardless of type.
|
||||
|
||||
### `GET /api/<camera_name>/grid.jpg`
|
||||
|
||||
Returns the latest camera image with the regions grid overlaid.
|
||||
|
||||
| param | Type | Description |
|
||||
| ------------ | ----- | ------------------------------------------------------------------------------------------ |
|
||||
| `color` | str | The color of the grid (red,green,blue,black,white). Defaults to "green". |
|
||||
| `font_scale` | float | Font scale. Can be used to increase font size on high resolution cameras. Defaults to 0.5. |
|
||||
|
||||
### `GET /clips/<camera>-<id>.jpg`
|
||||
|
||||
JPG snapshot for the given camera and event id.
|
||||
|
||||
## Events
|
||||
|
||||
### `GET /api/events`
|
||||
|
||||
Events from the database. Accepts the following query string parameters:
|
||||
@@ -175,16 +238,6 @@ Events from the database. Accepts the following query string parameters:
|
||||
| `min_length` | float | Minimum length of the event |
|
||||
| `max_length` | float | Maximum length of the event |
|
||||
|
||||
### `GET /api/timeline`
|
||||
|
||||
Timeline of key moments of an event(s) from the database. Accepts the following query string parameters:
|
||||
|
||||
| param | Type | Description |
|
||||
| ----------- | ---- | ----------------------------------- |
|
||||
| `camera` | str | Name of camera |
|
||||
| `source_id` | str | ID of tracked object |
|
||||
| `limit` | int | Limit the number of events returned |
|
||||
|
||||
### `GET /api/events/summary`
|
||||
|
||||
Returns summary data for events in the database. Used by the Home Assistant integration.
|
||||
@@ -225,7 +278,7 @@ Sub labels must be 100 characters or shorter.
|
||||
```json
|
||||
{
|
||||
"subLabel": "some_string",
|
||||
"subLabelScore": 0.79,
|
||||
"subLabelScore": 0.79
|
||||
}
|
||||
```
|
||||
|
||||
@@ -233,14 +286,18 @@ Sub labels must be 100 characters or shorter.
|
||||
|
||||
Returns a thumbnail for the event id optimized for notifications. Works while the event is in progress and after completion. Passing `?format=android` will convert the thumbnail to 2:1 aspect ratio.
|
||||
|
||||
### `GET /api/<camera_name>/<label>/thumbnail.jpg`
|
||||
|
||||
Returns the thumbnail from the latest event for the given camera and label combo. Using `any` as the label will return the latest thumbnail regardless of type.
|
||||
|
||||
### `GET /api/events/<id>/clip.mp4`
|
||||
|
||||
Returns the clip for the event id. Works after the event has ended.
|
||||
|
||||
### `GET /api/events/<id>/snapshot-clean.png`
|
||||
|
||||
Returns the clean snapshot image for the event id. Only works if `snapshots` and `clean_copy` are enabled in the config.
|
||||
|
||||
| param | Type | Description |
|
||||
| ---------- | ---- | ------------------ |
|
||||
| `download` | bool | Download the image |
|
||||
|
||||
### `GET /api/events/<id>/snapshot.jpg`
|
||||
|
||||
Returns the snapshot image for the event id. Works while the event is in progress and after completion.
|
||||
@@ -254,75 +311,13 @@ Accepts the following query string parameters, but they are only applied when an
|
||||
| `timestamp` | int | Print the timestamp in the upper left (0 or 1) |
|
||||
| `crop` | int | Crop the snapshot to the (0 or 1) |
|
||||
| `quality` | int | Jpeg encoding quality (0-100). Defaults to 70. |
|
||||
|
||||
### `GET /api/<camera_name>/<label>/snapshot.jpg`
|
||||
|
||||
Returns the snapshot image from the latest event for the given camera and label combo. Using `any` as the label will return the latest thumbnail regardless of type.
|
||||
|
||||
### `GET /api/<camera_name>/recordings/<frame_time>/snapshot.png`
|
||||
|
||||
Returns the snapshot image from the specific point in that cameras recordings.
|
||||
|
||||
### `GET /clips/<camera>-<id>.jpg`
|
||||
|
||||
JPG snapshot for the given camera and event id.
|
||||
|
||||
### `GET /vod/<year>-<month>/<day>/<hour>/<camera>/master.m3u8`
|
||||
|
||||
HTTP Live Streaming Video on Demand URL for the specified hour and camera. Can be viewed in an application like VLC.
|
||||
|
||||
### `GET /vod/event/<event-id>/index.m3u8`
|
||||
|
||||
HTTP Live Streaming Video on Demand URL for the specified event. Can be viewed in an application like VLC.
|
||||
|
||||
### `GET /vod/<camera>/start/<start-timestamp>/end/<end-timestamp>/index.m3u8`
|
||||
|
||||
HTTP Live Streaming Video on Demand URL for the camera with the specified time range. Can be viewed in an application like VLC.
|
||||
|
||||
### `POST /api/export/<camera>/start/<start-timestamp>/end/<end-timestamp>`
|
||||
|
||||
Export recordings from `start-timestamp` to `end-timestamp` for `camera` as a single mp4 file. These recordings will be exported to the `/media/frigate/exports` folder.
|
||||
|
||||
It is also possible to export this recording as a timelapse.
|
||||
|
||||
**Optional Body:**
|
||||
|
||||
```json
|
||||
{
|
||||
"playback": "realtime", // playback factor: realtime or timelapse_25x
|
||||
}
|
||||
```
|
||||
|
||||
### `GET /api/<camera_name>/recordings/summary`
|
||||
|
||||
Hourly summary of recordings data for a camera.
|
||||
|
||||
### `GET /api/<camera_name>/recordings`
|
||||
|
||||
Get recording segment details for the given timestamp range.
|
||||
|
||||
| param | Type | Description |
|
||||
| -------- | ---- | ------------------------------------- |
|
||||
| `after` | int | Unix timestamp for beginning of range |
|
||||
| `before` | int | Unix timestamp for end of range |
|
||||
|
||||
### `GET /api/ffprobe`
|
||||
|
||||
Get ffprobe output for camera feed paths.
|
||||
|
||||
| param | Type | Description |
|
||||
| ------- | ------ | ---------------------------------- |
|
||||
| `paths` | string | `,` separated list of camera paths |
|
||||
|
||||
### `GET /api/<camera_name>/ptz/info`
|
||||
|
||||
Get PTZ info for the camera.
|
||||
| `download` | bool | Download the image |
|
||||
|
||||
### `POST /api/events/<camera_name>/<label>/create`
|
||||
|
||||
Create a manual event with a given `label` (ex: doorbell press) to capture a specific event besides an object being detected.
|
||||
|
||||
:::caution
|
||||
:::warning
|
||||
|
||||
Recording retention config still applies to manual events, if frigate is configured with `mode: motion` then the manual event will only keep recording segments when motion occurred.
|
||||
|
||||
@@ -361,3 +356,170 @@ Recording retention config still applies to manual events, if frigate is configu
|
||||
### `PUT /api/events/<event_id>/end`
|
||||
|
||||
End a specific manual event without a predetermined length.
|
||||
|
||||
### `GET /api/events/<id>/preview.gif`
|
||||
|
||||
Gif covering the first 20 seconds of a specific event.
|
||||
|
||||
## Previews
|
||||
|
||||
Previews are low res / fps videos that are quickly scrubbable and can be used for notifications or time-lapses.
|
||||
|
||||
### `GET /api/preview/<camera>/start/<start-timestamp>/end/<end-timestamp>`
|
||||
|
||||
Metadata about previews for this time range.
|
||||
|
||||
### `GET /api/preview/<year>-<month>/<day>/<hour>/<camera>/<timezone>`
|
||||
|
||||
Metadata about previews for this hour
|
||||
|
||||
### `GET /api/preview/<camera>/start/<start-timestamp>/end/<end-timestamp>`
|
||||
|
||||
List of frames in the preview cache for the time range. Previews are only kept in the cache until they are combined into an mp4 at the end of the hour.
|
||||
|
||||
### `GET /api/preview/<file_name>/thumbnail.jpg`
|
||||
|
||||
Specific preview frame from preview cache.
|
||||
|
||||
### `GET /<camera>/start/<start-timestamp>/end/<end-timestamp>/preview.gif`
|
||||
|
||||
Gif made from preview video / frames during this time range
|
||||
|
||||
## Recordings
|
||||
|
||||
### `GET /vod/<year>-<month>/<day>/<hour>/<camera>/master.m3u8`
|
||||
|
||||
HTTP Live Streaming Video on Demand URL for the specified hour and camera. Can be viewed in an application like VLC.
|
||||
|
||||
### `GET /vod/event/<event-id>/index.m3u8`
|
||||
|
||||
HTTP Live Streaming Video on Demand URL for the specified event. Can be viewed in an application like VLC.
|
||||
|
||||
### `GET /vod/<camera>/start/<start-timestamp>/end/<end-timestamp>/index.m3u8`
|
||||
|
||||
HTTP Live Streaming Video on Demand URL for the camera with the specified time range. Can be viewed in an application like VLC.
|
||||
|
||||
### `POST /api/export/<camera>/start/<start-timestamp>/end/<end-timestamp>`
|
||||
|
||||
Export recordings from `start-timestamp` to `end-timestamp` for `camera` as a single mp4 file. These recordings will be exported to the `/media/frigate/exports` folder.
|
||||
|
||||
It is also possible to export this recording as a time-lapse.
|
||||
|
||||
**Optional Body:**
|
||||
|
||||
```json
|
||||
{
|
||||
"playback": "realtime" // playback factor: realtime or timelapse_25x
|
||||
}
|
||||
```
|
||||
|
||||
### `DELETE /api/export/<export_name>`
|
||||
|
||||
Delete an export from disk.
|
||||
|
||||
### `PATCH /api/export/<export_name_current>/<export_name_new>`
|
||||
|
||||
Renames an export.
|
||||
|
||||
### `GET /api/<camera_name>/recordings/summary`
|
||||
|
||||
Hourly summary of recordings data for a camera.
|
||||
|
||||
### `GET /api/<camera_name>/recordings`
|
||||
|
||||
Get recording segment details for the given timestamp range.
|
||||
|
||||
| param | Type | Description |
|
||||
| -------- | ---- | ------------------------------------- |
|
||||
| `after` | int | Unix timestamp for beginning of range |
|
||||
| `before` | int | Unix timestamp for end of range |
|
||||
|
||||
### `GET /api/<camera_name>/recordings/<frame_time>/snapshot.png`
|
||||
|
||||
Returns the snapshot image from the specific point in that cameras recordings.
|
||||
|
||||
## Reviews
|
||||
|
||||
### `GET /api/review`
|
||||
|
||||
Reviews from the database. Accepts the following query string parameters:
|
||||
|
||||
| param | Type | Description |
|
||||
| ---------- | ---- | -------------------------------------------------------------- |
|
||||
| `before` | int | Epoch time |
|
||||
| `after` | int | Epoch time |
|
||||
| `cameras` | str | , separated list of cameras |
|
||||
| `labels` | str | , separated list of labels |
|
||||
| `reviewed` | int | Include items that have been reviewed (0 or 1) |
|
||||
| `limit` | int | Limit the number of events returned |
|
||||
| `severity` | str | Limit items to severity (alert, detection, significant_motion) |
|
||||
|
||||
### `GET /api/review/summary`
|
||||
|
||||
Summary of reviews for the last 30 days. Accepts the following query string parameters:
|
||||
|
||||
| param | Type | Description |
|
||||
| ---------- | ---- | --------------------------- |
|
||||
| `cameras` | str | , separated list of cameras |
|
||||
| `labels` | str | , separated list of labels |
|
||||
| `timezone` | str | Timezone name |
|
||||
|
||||
### `POST /api/reviews/viewed`
|
||||
|
||||
Mark item(s) as reviewed.
|
||||
|
||||
**Required Body:**
|
||||
|
||||
```json
|
||||
{
|
||||
"ids": ["123", "456"] // , separated list of review IDs
|
||||
}
|
||||
```
|
||||
|
||||
### `DELETE /api/review/<id>/viewed`
|
||||
|
||||
Mark an item as not reviewed.
|
||||
|
||||
### `POST /api/reviews/delete`
|
||||
|
||||
Delete review items.
|
||||
|
||||
**Required Body:**
|
||||
|
||||
```json
|
||||
{
|
||||
"ids": ["123", "456"] // , separated list of review IDs
|
||||
}
|
||||
```
|
||||
|
||||
### `GET /review/activity/motion`
|
||||
|
||||
Get the motion activity for camera(s) during a specified time period.
|
||||
|
||||
| param | Type | Description |
|
||||
| ---------- | ---- | -------------------------------------------------------------- |
|
||||
| `before` | int | Epoch time |
|
||||
| `after` | int | Epoch time |
|
||||
| `cameras` | str | , separated list of cameras |
|
||||
|
||||
### `GET /review/activity/audio`
|
||||
|
||||
Get the audio activity for camera(s) during a specified time period.
|
||||
|
||||
| param | Type | Description |
|
||||
| ---------- | ---- | -------------------------------------------------------------- |
|
||||
| `before` | int | Epoch time |
|
||||
| `after` | int | Epoch time |
|
||||
| `cameras` | str | , separated list of cameras |
|
||||
|
||||
## Timeline
|
||||
|
||||
### `GET /api/timeline`
|
||||
|
||||
Timeline of key moments of an event(s) from the database. Accepts the following query string parameters:
|
||||
|
||||
| param | Type | Description |
|
||||
| ----------- | ---- | ----------------------------------- |
|
||||
| `camera` | str | Name of camera |
|
||||
| `source_id` | str | ID of tracked object |
|
||||
| `limit` | int | Limit the number of events returned |
|
||||
|
||||
@@ -47,7 +47,55 @@ that card.
|
||||
|
||||
## Configuration
|
||||
|
||||
When configuring the integration, you will be asked for the `URL` of your Frigate instance which is the URL you use to access Frigate in the browser. This may look like `http://<host>:5000/`. If you are using HassOS with the addon, the URL should be one of the following depending on which addon version you are using. Note that if you are using the Proxy Addon, you do NOT point the integration at the proxy URL. Just enter the URL used to access Frigate directly from your network.
|
||||
When configuring the integration, you will be asked for the `URL` of your Frigate instance which needs to be pointed at the internal unauthenticated port (`5000`) for your instance. This may look like `http://<host>:5000/`.
|
||||
|
||||
### Docker Compose Examples
|
||||
|
||||
If you are running Home Assistant Core and Frigate with Docker Compose on the same device, here are some examples.
|
||||
|
||||
#### Home Assistant running with host networking
|
||||
|
||||
It is not recommended to run Frigate in host networking mode. In this example, you would use `http://172.17.0.1:5000` when configuring the integration.
|
||||
|
||||
```yaml
|
||||
services:
|
||||
homeassistant:
|
||||
container_name: hass
|
||||
image: ghcr.io/home-assistant/home-assistant:stable
|
||||
network_mode: host
|
||||
...
|
||||
|
||||
frigate:
|
||||
image: ghcr.io/blakeblackshear/frigate:stable
|
||||
...
|
||||
ports:
|
||||
- "172.17.0.1:5000:5000"
|
||||
...
|
||||
```
|
||||
|
||||
#### Home Assistant _not_ running with host networking or in a separate compose file
|
||||
|
||||
In this example, you would use `http://frigate:5000` when configuring the integration. There is no need to map the port for the Frigate container.
|
||||
|
||||
```yaml
|
||||
services:
|
||||
homeassistant:
|
||||
container_name: hass
|
||||
image: ghcr.io/home-assistant/home-assistant:stable
|
||||
# network_mode: host
|
||||
...
|
||||
|
||||
frigate:
|
||||
image: ghcr.io/blakeblackshear/frigate:stable
|
||||
...
|
||||
ports:
|
||||
# - "172.17.0.1:5000:5000"
|
||||
...
|
||||
```
|
||||
|
||||
### HassOS Addon
|
||||
|
||||
If you are using HassOS with the addon, the URL should be one of the following depending on which addon version you are using. Note that if you are using the Proxy Addon, you do NOT point the integration at the proxy URL. Just enter the URL used to access Frigate directly from your network.
|
||||
|
||||
| Addon Version | URL |
|
||||
| ------------------------------ | -------------------------------------- |
|
||||
@@ -56,7 +104,37 @@ When configuring the integration, you will be asked for the `URL` of your Frigat
|
||||
| Frigate NVR Beta | `http://ccab4aaf-frigate-beta:5000` |
|
||||
| Frigate NVR Beta (Full Access) | `http://ccab4aaf-frigate-fa-beta:5000` |
|
||||
|
||||
<a name="options"></a>
|
||||
### Frigate running on a separate machine
|
||||
|
||||
If you run Frigate on a separate device within your local network, Home Assistant will need access to port 5000.
|
||||
|
||||
#### Local network
|
||||
|
||||
Use `http://<frigate_device_ip>:5000` as the URL for the integration. If you want to protect access to port 5000, you can use firewall rules to limit access to the device running Home Assistant.
|
||||
|
||||
```yaml
|
||||
services:
|
||||
frigate:
|
||||
image: ghcr.io/blakeblackshear/frigate:stable
|
||||
...
|
||||
ports:
|
||||
- "5000:5000"
|
||||
...
|
||||
```
|
||||
|
||||
#### Tailscale or other private networking
|
||||
|
||||
Use `http://<frigate_device_tailscale_ip>:5000` as the URL for the integration.
|
||||
|
||||
```yaml
|
||||
services:
|
||||
frigate:
|
||||
image: ghcr.io/blakeblackshear/frigate:stable
|
||||
...
|
||||
ports:
|
||||
- "<tailscale_ip>:5000:5000"
|
||||
...
|
||||
```
|
||||
|
||||
## Options
|
||||
|
||||
@@ -64,9 +142,9 @@ When configuring the integration, you will be asked for the `URL` of your Frigat
|
||||
Home Assistant > Configuration > Integrations > Frigate > Options
|
||||
```
|
||||
|
||||
| Option | Description |
|
||||
| ----------------- | ------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------ |
|
||||
| RTSP URL Template | A [jinja2](https://jinja.palletsprojects.com/) template that is used to override the standard RTSP stream URL (e.g. for use with reverse proxies). This option is only shown to users who have [advanced mode](https://www.home-assistant.io/blog/2019/07/17/release-96/#advanced-mode) enabled. See [RTSP streams](#streams) below. |
|
||||
| Option | Description |
|
||||
| ----------------- | ---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
|
||||
| RTSP URL Template | A [jinja2](https://jinja.palletsprojects.com/) template that is used to override the standard RTSP stream URL (e.g. for use with reverse proxies). This option is only shown to users who have [advanced mode](https://www.home-assistant.io/blog/2019/07/17/release-96/#advanced-mode) enabled. See [RTSP streams](#rtsp-stream) below. |
|
||||
|
||||
## Entities Provided
|
||||
|
||||
@@ -124,10 +202,6 @@ https://HA_URL/api/frigate/notifications/<event-id>/clip.mp4
|
||||
|
||||
<a name="streams"></a>
|
||||
|
||||
## RTMP stream
|
||||
|
||||
RTMP is deprecated and it is recommended to switch to use RTSP restreams.
|
||||
|
||||
## RTSP stream
|
||||
|
||||
In order for the live streams to function they need to be accessible on the RTSP
|
||||
@@ -177,12 +251,12 @@ The Frigate integration seamlessly supports the use of multiple Frigate servers.
|
||||
In order for multiple Frigate instances to function correctly, the
|
||||
`topic_prefix` and `client_id` parameters must be set differently per server.
|
||||
See [MQTT
|
||||
configuration](mqtt.md)
|
||||
configuration](mqtt)
|
||||
for how to set these.
|
||||
|
||||
#### API URLs
|
||||
|
||||
When multiple Frigate instances are configured, [API](#api) URLs should include an
|
||||
When multiple Frigate instances are configured, [API](#notification-api) URLs should include an
|
||||
identifier to tell Home Assistant which Frigate instance to refer to. The
|
||||
identifier used is the MQTT `client_id` parameter included in the configuration,
|
||||
and is used like so:
|
||||
|
||||
@@ -221,6 +221,10 @@ Topic to turn the PTZ autotracker for a camera on and off. Expected values are `
|
||||
|
||||
Topic with current state of the PTZ autotracker for a camera. Published values are `ON` and `OFF`.
|
||||
|
||||
### `frigate/<camera_name>/ptz_autotracker/active`
|
||||
|
||||
Topic to determine if PTZ autotracker is actively tracking an object. Published values are `ON` and `OFF`.
|
||||
|
||||
### `frigate/<camera_name>/birdseye/set`
|
||||
|
||||
Topic to turn Birdseye for a camera on and off. Expected values are `ON` and `OFF`. Birdseye mode
|
||||
|
||||
@@ -19,9 +19,9 @@ Once logged in, you can generate an API key for Frigate in Settings.
|
||||
|
||||
### Set your API key
|
||||
|
||||
In Frigate, you can set the `PLUS_API_KEY` environment variable to enable the `SEND TO FRIGATE+` buttons on the events page. You can set it in your Docker Compose file or in your Docker run command. Home Assistant Addon users can set it under Settings > Addons > Frigate NVR > Configuration > Options (be sure to toggle the "Show unused optional configuration options" switch).
|
||||
In Frigate, you can use an environment variable or a docker secret named `PLUS_API_KEY` to enable the `SEND TO FRIGATE+` buttons on the events page. Home Assistant Addon users can set it under Settings > Addons > Frigate NVR > Configuration > Options (be sure to toggle the "Show unused optional configuration options" switch).
|
||||
|
||||
:::caution
|
||||
:::warning
|
||||
|
||||
You cannot use the `environment_vars` section of your configuration file to set this environment variable.
|
||||
|
||||
@@ -37,11 +37,13 @@ Snapshots must be enabled to be able to submit examples to Frigate+
|
||||
|
||||
:::
|
||||
|
||||

|
||||

|
||||
|
||||

|
||||
|
||||
### Annotate and verify
|
||||
|
||||
You can view all of your submitted images at [https://plus.frigate.video](https://plus.frigate.video). Annotations can be added by clicking an image.
|
||||
You can view all of your submitted images at [https://plus.frigate.video](https://plus.frigate.video). Annotations can be added by clicking an image. For more detailed information about labeling, see the documentation on [improving your model](../plus/improving_model.md).
|
||||
|
||||

|
||||
|
||||
@@ -56,7 +58,7 @@ model:
|
||||
|
||||
Models are downloaded into the `/config/model_cache` folder and only downloaded if needed.
|
||||
|
||||
You can override the labelmap for Frigate+ models like this:
|
||||
If needed, you can override the labelmap for Frigate+ models. This is not recommended as renaming labels will break the Submit to Frigate+ feature if the labels are not available in Frigate+.
|
||||
|
||||
```yaml
|
||||
model:
|
||||
|
||||
@@ -4,9 +4,9 @@ title: Third Party Extensions
|
||||
---
|
||||
|
||||
Being open source, others have the possibility to modify and extend the rich functionality Frigate already offers.
|
||||
This page is meant to be an overview over additions one can make to the home NVR setup. The list is not exhaustive and can be extended via PR to the Frigate docs.
|
||||
This page is meant to be an overview over additions one can make to the home NVR setup. The list is not exhaustive and can be extended via PR to the Frigate docs. Most of these services are designed to interface with Frigate's unauthenticated api over port 5000.
|
||||
|
||||
:::caution
|
||||
:::warning
|
||||
|
||||
This page does not recommend or rate the presented projects.
|
||||
Please use your own knowledge to assess and vet them before you install anything on your system.
|
||||
|
||||
24
docs/docs/plus/faq.md
Normal file
24
docs/docs/plus/faq.md
Normal file
@@ -0,0 +1,24 @@
|
||||
---
|
||||
id: faq
|
||||
title: FAQ
|
||||
---
|
||||
|
||||
### Are my models trained just on my image uploads? How are they built?
|
||||
|
||||
Frigate+ models are built by fine tuning a base model with the images you have annotated and verified. The base model is trained from scratch from a sampling of images across all Frigate+ user submissions and takes weeks of expensive GPU resources to train. If the models were built using your image uploads alone, you would need to provide tens of thousands of examples and it would take more than a week (and considerable cost) to train. Diversity helps the model generalize.
|
||||
|
||||
### Are my video feeds sent to the cloud for analysis when using Frigate+ models?
|
||||
|
||||
No. Frigate+ models are a drop in replacement for the default model. All processing is performed locally as always. The only images sent to Frigate+ are the ones you specifically submit via the `Send to Frigate+` button or upload directly.
|
||||
|
||||
### Can I label anything I want and train the model to recognize something custom for me?
|
||||
|
||||
Not currently. At the moment, the set of labels will be consistent for all users. The focus will be on expanding that set of labels before working on completely custom user labels.
|
||||
|
||||
### Can Frigate+ models be used offline?
|
||||
|
||||
Yes. Models and metadata are stored in the `model_cache` directory within the config folder. Frigate will only attempt to download a model if it does not exist in the cache. This means you can backup the directory and/or use it completely offline.
|
||||
|
||||
### Can I keep using my Frigate+ models even if I do not renew my subscription?
|
||||
|
||||
Yes. Subscriptions to Frigate+ provide access to the infrastructure used to train the models. Models trained with your subscription are yours to keep and use forever. However, do note that the terms and conditions prohibit you from sharing, reselling, or creating derivative products from the models.
|
||||
63
docs/docs/plus/first_model.md
Normal file
63
docs/docs/plus/first_model.md
Normal file
@@ -0,0 +1,63 @@
|
||||
---
|
||||
id: first_model
|
||||
title: Requesting your first model
|
||||
---
|
||||
|
||||
## Step 1: Upload and annotate your images
|
||||
|
||||
Before requesting your first model, you will need to upload at least 10 images to Frigate+. But for the best results, you should provide at least 100 verified images per camera. Keep in mind that varying conditions should be included. You will want images from cloudy days, sunny days, dawn, dusk, and night. Refer to the [integration docs](../integrations/plus.md#generate-an-api-key) for instructions on how to easily submit images to Frigate+ directly from Frigate.
|
||||
|
||||
It is recommended to submit **both** true positives and false positives. This will help the model differentiate between what is and isn't correct. You should aim for a target of 80% true positive submissions and 20% false positives across all of your images. If you are experiencing false positives in a specific area, submitting true positives for any object type near that area in similar lighting conditions will help teach the model what that area looks like when no objects are present.
|
||||
|
||||
For more detailed recommendations, you can refer to the docs on [improving your model](./improving_model.md).
|
||||
|
||||
## Step 2: Submit a model request
|
||||
|
||||
Once you have an initial set of verified images, you can request a model on the Models page. Each model request requires 1 of the 12 trainings that you receive with your annual subscription. This model will support all [label types available](./index.md#available-label-types) even if you do not submit any examples for those labels. Model creation can take up to 36 hours.
|
||||

|
||||
|
||||
## Step 3: Set your model id in the config
|
||||
|
||||
You will receive an email notification when your Frigate+ model is ready.
|
||||

|
||||
|
||||
Models available in Frigate+ can be used with a special model path. No other information needs to be configured because it fetches the remaining config from Frigate+ automatically.
|
||||
|
||||
```yaml
|
||||
model:
|
||||
path: plus://<your_model_id>
|
||||
```
|
||||
|
||||
## Step 4: Adjust your object filters for higher scores
|
||||
|
||||
Frigate+ models generally have much higher scores than the default model provided in Frigate. You will likely need to increase your `threshold` and `min_score` values. Here is an example of how these values can be refined, but you should expect these to evolve as your model improves. For more information about how `threshold` and `min_score` are related, see the docs on [object filters](../configuration/object_filters.md#object-scores).
|
||||
|
||||
```yaml
|
||||
objects:
|
||||
filters:
|
||||
dog:
|
||||
min_score: .7
|
||||
threshold: .9
|
||||
cat:
|
||||
min_score: .65
|
||||
threshold: .8
|
||||
face:
|
||||
min_score: .7
|
||||
package:
|
||||
min_score: .65
|
||||
threshold: .9
|
||||
license_plate:
|
||||
min_score: .6
|
||||
amazon:
|
||||
min_score: .75
|
||||
ups:
|
||||
min_score: .75
|
||||
fedex:
|
||||
min_score: .75
|
||||
person:
|
||||
min_score: .65
|
||||
threshold: .85
|
||||
car:
|
||||
min_score: .65
|
||||
threshold: .85
|
||||
```
|
||||
53
docs/docs/plus/improving_model.md
Normal file
53
docs/docs/plus/improving_model.md
Normal file
@@ -0,0 +1,53 @@
|
||||
---
|
||||
id: improving_model
|
||||
title: Improving your model
|
||||
---
|
||||
|
||||
You may find that Frigate+ models result in more false positives initially, but by submitting true and false positives, the model will improve. Because a limited number of users submitted images to Frigate+ prior to this launch, you may need to submit several hundred images per camera to see good results. With all the new images now being submitted, future base models will improve as more and more users (including you) submit examples to Frigate+. Note that only verified images will be used when training your model. Submitting an image from Frigate as a true or false positive will not verify the image. You still must verify the image in Frigate+ in order for it to be used in training.
|
||||
|
||||
- **Submit both true positives and false positives**. This will help the model differentiate between what is and isn't correct. You should aim for a target of 80% true positive submissions and 20% false positives across all of your images. If you are experiencing false positives in a specific area, submitting true positives for any object type near that area in similar lighting conditions will help teach the model what that area looks like when no objects are present.
|
||||
- **Lower your thresholds a little in order to generate more false/true positives near the threshold value**. For example, if you have some false positives that are scoring at 68% and some true positives scoring at 72%, you can try lowering your threshold to 65% and submitting both true and false positives within that range. This will help the model learn and widen the gap between true and false positive scores.
|
||||
- **Submit diverse images**. For the best results, you should provide at least 100 verified images per camera. Keep in mind that varying conditions should be included. You will want images from cloudy days, sunny days, dawn, dusk, and night. As circumstances change, you may need to submit new examples to address new types of false positives. For example, the change from summer days to snowy winter days or other changes such as a new grill or patio furniture may require additional examples and training.
|
||||
|
||||
## Properly labeling images
|
||||
|
||||
For the best results, follow the following guidelines.
|
||||
|
||||
**Label every object in the image**: It is important that you label all objects in each image before verifying. If you don't label a car for example, the model will be taught that part of the image is _not_ a car and it will start to get confused.
|
||||
|
||||
**Make tight bounding boxes**: Tighter bounding boxes improve the recognition and ensure that accurate bounding boxes are predicted at runtime.
|
||||
|
||||
**Label the full object even when occluded**: If you have a person standing behind a car, label the full person even though a portion of their body may be hidden behind the car. This helps predict accurate bounding boxes and improves zone accuracy and filters at runtime. If an object is partly out of frame, label it only when a person would reasonably be able to recognize the object from the visible parts.
|
||||
|
||||
**Label objects hard to identify as difficult**: When objects are truly difficult to make out, such as a car barely visible through a bush, or a dog that is hard to distinguish from the background at night, flag it as 'difficult'. This is not used in the model training as of now, but will in the future.
|
||||
|
||||
**`amazon`, `ups`, and `fedex` should label the logo**: For a Fedex truck, label the truck as a `car` and make a different bounding box just for the Fedex logo. If there are multiple logos, label each of them.
|
||||
|
||||

|
||||
|
||||
## False positive labels
|
||||
|
||||
False positives will be shown with a read box and the label will have a strike through.
|
||||

|
||||
|
||||
Misidentified objects should have a correct label added. For example, if a person was mistakenly detected as a cat, you should submit it as a false positive in Frigate and add a label for the person. The boxes will overlap.
|
||||
|
||||

|
||||
|
||||
## Shortcuts for a faster workflow
|
||||
|
||||
|Shortcut Key|Description|
|
||||
|-----|--------|
|
||||
|`?`|Show all keyboard shortcuts|
|
||||
|`w`|Add box|
|
||||
|`d`|Toggle difficult|
|
||||
|`s`|Switch to the next label|
|
||||
|`tab`|Select next largest box|
|
||||
|`del`|Delete current box|
|
||||
|`esc`|Deselect/Cancel|
|
||||
|`← ↑ → ↓`|Move box|
|
||||
|`Shift + ← ↑ → ↓`|Resize box|
|
||||
|`-`|Zoom out|
|
||||
|`=`|Zoom in|
|
||||
|`f`|Hide/show all but current box|
|
||||
|`spacebar`|Verify and save|
|
||||
@@ -1,87 +1,37 @@
|
||||
---
|
||||
id: index
|
||||
title: Models Guide
|
||||
title: Models
|
||||
---
|
||||
|
||||
Frigate+ offers models trained from scratch and specifically designed for the way Frigate NVR analyzes video footage. These models offer higher accuracy with less resources. By uploading your own labeled examples, your model is tuned for accuracy in your specific conditions. After tuning, performance is evaluated against a broad dataset and real world examples submitted by other Frigate+ users to prevent overfitting.
|
||||
<a href="https://plus.frigate.video" target="_blank" rel="nofollow">Frigate+</a> offers models trained on images submitted by Frigate+ users from their security cameras and is specifically designed for the way Frigate NVR analyzes video footage. These models offer higher accuracy with less resources. The images you upload are used to fine tune a baseline model trained from images uploaded by all Frigate+ users. This fine tuning process results in a model that is optimized for accuracy in your specific conditions.
|
||||
|
||||
With a subscription, and at each annual renewal, you will receive 12 model training credits that can be used to train tuned models. If you cancel your subscription, you will keep your existing credits and retain access to any trained models. Users with an active subscription can purchase additional training credits for $5 each.
|
||||
:::info
|
||||
|
||||
Information on how to integrate Frigate+ with Frigate can be found in the [integrations docs](/integrations/plus).
|
||||
The baseline model isn't directly available after subscribing. This may change in the future, but for now you will need to submit a model request with the minimum number of images.
|
||||
|
||||
## Frequently asked questions
|
||||
:::
|
||||
|
||||
### Are my models trained just on my image uploads? How are they built?
|
||||
With a subscription, 12 model trainings per year are included. If you cancel your subscription, you will retain access to any trained models. An active subscription is required to submit model requests or purchase additional trainings.
|
||||
|
||||
Frigate+ models are built by fine tuning a base model with the images you have annotated and verified. The base model is trained from scratch from a sampling of images across all Frigate+ user submissions and takes weeks of expensive GPU resources to train. If the models were built using your image uploads alone, you would need to provide tens of thousands of examples and it would take more than a week (and considerable cost) to train. Diversity helps the model generalize.
|
||||
Information on how to integrate Frigate+ with Frigate can be found in the [integration docs](../integrations/plus.md).
|
||||
|
||||
### What is a training credit and how do I use them?
|
||||
## Supported detector types
|
||||
|
||||
Essentially, `1 training credit = 1 trained model`. When you have uploaded, annotated, and verified additional images and you are ready to train your model, you will submit a model request which will use one credit. The model that is trained will utilize all of the verified images in your account.
|
||||
:::warning
|
||||
|
||||
### Are my video feeds sent to the cloud for analysis when using Frigate+ models?
|
||||
Frigate+ models are not supported for TensorRT or OpenVino yet.
|
||||
|
||||
No. Frigate+ models are a drop in replacement for the default model. All processing is performed locally as always. The only images sent to Frigate+ are the ones you specifically submit via the `Send to Frigate+` button or upload directly.
|
||||
|
||||
### Can I label anything I want and train the model to recognize something custom for me?
|
||||
|
||||
Not currently. At the moment, the set of labels will be consistent for all users. The focus will be on expanding that set of labels before working on completely custom user labels.
|
||||
|
||||
### Can Frigate+ models be used offline?
|
||||
|
||||
Yes. Models and metadata are stored in the `model_cache` directory within the config folder. Frigate will only attempt to download a model if it does not exist in the cache. This means you can backup the directory and/or use it completely offline.
|
||||
|
||||
### Can I keep using my Frigate+ models even if I do not renew my subscription?
|
||||
|
||||
Yes. Subscriptions to Frigate+ provide access to the infrastructure used to train the models. Models trained using the training credits that you purchased are yours to keep and use forever. However, do note that the terms and conditions prohibit you from sharing, reselling, or creating derivative products from the models.
|
||||
|
||||
## Important model information
|
||||
|
||||
### Supported Model Types
|
||||
:::
|
||||
|
||||
Currently, Frigate+ models only support CPU (`cpu`) and Coral (`edgetpu`) models. OpenVino is next in line to gain support.
|
||||
|
||||
The models are created using the same MobileDet architecture as the default model. Additional architectures will be added in future releases as needed.
|
||||
|
||||
### Higher Scores
|
||||
|
||||
Frigate+ models generally have much higher scores than the default model provided in Frigate. You will likely need to increase your `threshold` and `min_score` values. Here is an example of how these values can be refined, but you should expect these to evolve as your model improves:
|
||||
|
||||
```yaml
|
||||
objects:
|
||||
filters:
|
||||
dog:
|
||||
min_score: .7
|
||||
threshold: .9
|
||||
cat:
|
||||
min_score: .65
|
||||
threshold: .8
|
||||
face:
|
||||
min_score: .7
|
||||
package:
|
||||
min_score: .65
|
||||
threshold: .9
|
||||
license_plate:
|
||||
min_score: .6
|
||||
amazon:
|
||||
min_score: .75
|
||||
ups:
|
||||
min_score: .75
|
||||
fedex:
|
||||
min_score: .75
|
||||
person:
|
||||
min_score: .65
|
||||
threshold: .85
|
||||
car:
|
||||
min_score: .65
|
||||
threshold: .85
|
||||
```
|
||||
|
||||
### Available label types
|
||||
## Available label types
|
||||
|
||||
Frigate+ models support a more relevant set of objects for security cameras. Currently, only the following objects are supported: `person`, `face`, `car`, `license_plate`, `amazon`, `ups`, `fedex`, `package`, `dog`, `cat`, `deer`. Other object types available in the default Frigate model are not available. Additional object types will be added in future releases.
|
||||
|
||||
#### Label attributes
|
||||
### Label attributes
|
||||
|
||||
Frigate has special handling for some labels when using Frigate+ models. `face`, `license_plate`, `amazon`, `ups`, and `fedex` are considered attribute labels which are not tracked like regular objects and do not generate events. In addition, the `threshold` filter will have no effect on these labels. You should adjust the `min_score` and other filter values as needed.
|
||||
|
||||
@@ -109,31 +59,3 @@ When using Frigate+ models, Frigate will choose the snapshot of a person object
|
||||
`amazon`, `ups`, and `fedex` labels are used to automatically assign a sub label to car objects.
|
||||
|
||||

|
||||
|
||||
## Properly labeling images
|
||||
|
||||
For the best results, follow the following guidelines.
|
||||
|
||||
**Label every object in the image**: It is important that you label all objects in each image before verifying. If you don't label a car for example, the model will be taught that part of the image is _not_ a car and it will start to get confused.
|
||||
|
||||
**Make tight bounding boxes**: Tighter bounding boxes improve the recognition and ensure that accurate bounding boxes are predicted at runtime.
|
||||
|
||||
**Label the full object even when occluded**: If you have a person standing behind a car, label the full person even though a portion of their body may be hidden behind the car. This helps predict accurate bounding boxes and improves zone accuracy and filters at runtime.
|
||||
|
||||
**`amazon`, `ups`, and `fedex` should label the logo**: For a Fedex truck, label the truck as a `car` and make a different bounding box just for the Fedex logo. If there are multiple logos, label each of them.
|
||||
|
||||

|
||||
|
||||
## Improving your model
|
||||
|
||||
You may find that Frigate+ models result in more false positives initially, but by submitting true and false positives, the model will improve. This may be because your cameras don't look quite enough like the user submissions that were used to train the base model. Over time, this will improve as more and more users (including you) submit examples to Frigate+.
|
||||
|
||||
False positives can be reduced by submitting **both** true positives and false positives. This will help the model differentiate between what is and isn't correct.
|
||||
|
||||
You may find that it's helpful to lower your thresholds a little in order to generate more false/true positives near the threshold value. For example, if you have some false positives that are scoring at 68% and some true positives scoring at 72%, you can try lowering your threshold to 65% and submitting both true and false positives within that range. This will help the model learn and widen the gap between true and false positive scores.
|
||||
|
||||
Note that only verified images will be used when training your model. Submitting an image from Frigate as a true or false positive will not verify the image. You still must verify the image in Frigate+ in order for it to be used in training.
|
||||
|
||||
In order to request your first model, you will need to have annotated and verified at least 10 images. Each subsequent model request will require that 10 additional images are verified. However, this is the bare minimum. For the best results, you should provide at least 100 verified images per camera. Keep in mind that varying conditions should be included. You will want images from cloudy days, sunny days, dawn, dusk, and night.
|
||||
|
||||
As circumstances change, you may need to submit new examples to address new types of false positives. For example, the change from summer days to snowy winter days or other changes such as a new grill or patio furniture may require additional examples and training.
|
||||
|
||||
48
docs/docs/troubleshooting/edgetpu.md
Normal file
48
docs/docs/troubleshooting/edgetpu.md
Normal file
@@ -0,0 +1,48 @@
|
||||
---
|
||||
id: edgetpu
|
||||
title: Troubleshooting EdgeTPU
|
||||
---
|
||||
|
||||
## USB Coral Not Detected
|
||||
|
||||
There are many possible causes for a USB coral not being detected and some are OS specific. It is important to understand how the USB coral works:
|
||||
|
||||
1. When the device is first plugged in and has not initialized it will appear as `1a6e:089a Global Unichip Corp.` when running `lsusb` or checking the hardware page in HA OS.
|
||||
2. Once initialized, the device will appear as `18d1:9302 Google Inc.` when running `lsusb` or checking the hardware page in HA OS.
|
||||
|
||||
If the coral does not initialize then Frigate can not interface with it. Some common reasons for the USB based Coral not initializing are:
|
||||
|
||||
### Not Enough Power
|
||||
|
||||
The USB coral can draw up to 900mA and this can be too much for some on-device USB ports, especially for small board computers like the RPi. If the coral is not initializing then some recommended steps are:
|
||||
|
||||
1. Try a different port, some ports are capable of providing more power than others.
|
||||
2. Make sure the port is USB3, this is important for power and to ensure the coral runs at max speed.
|
||||
3. Try a different cable, some users have found the included cable to not work well.
|
||||
4. Use an externally powered USB hub.
|
||||
|
||||
### Incorrect Device Access
|
||||
|
||||
The USB coral has different IDs when it is uninitialized and initialized.
|
||||
|
||||
- When running Frigate in a VM, Proxmox lxc, etc. you must ensure both device IDs are mapped.
|
||||
- When running HA OS you may need to run the Full Access version of the Frigate addon with the `Protected Mode` switch disabled so that the coral can be accessed.
|
||||
|
||||
## USB Coral Detection Appears to be Stuck
|
||||
|
||||
The USB Coral can become stuck and need to be restarted, this can happen for a number of reasons depending on hardware and software setup. Some common reasons are:
|
||||
|
||||
1. Some users have found the cable included with the coral to cause this problem and that switching to a different cable fixed it entirely.
|
||||
2. Running Frigate in a VM may cause communication with the device to be lost and need to be reset.
|
||||
|
||||
## PCIe Coral Not Detected
|
||||
|
||||
The most common reason for the PCIe coral not being detected is that the driver has not been installed. See [the coral docs(https://coral.ai/docs/m2/get-started/#2-install-the-pcie-driver-and-edge-tpu-runtime) for how to install the driver for the PCIe based coral.
|
||||
|
||||
## Only One PCIe Coral Is Detected With Coral Dual EdgeTPU
|
||||
|
||||
Coral Dual EdgeTPU is one card with two identical TPU cores. Each core has it's own PCIe interface and motherboard needs to have two PCIe busses on the m.2 slot to make them both work.
|
||||
|
||||
E-key slot implemented to full m.2 electromechanical specification has two PCIe busses. Most motherboard manufacturers implement only one PCIe bus in m.2 E-key connector (this is why only one TPU is working). Some SBCs can have only USB bus on m.2 connector, ie none of TPUs will work.
|
||||
|
||||
In this case it is recommended to use a Dual EdgeTPU Adapter [like the one from MagicBlueSmoke](https://github.com/magic-blue-smoke/Dual-Edge-TPU-Adapter)
|
||||
@@ -56,4 +56,4 @@ SQLite does not work well on a network share, if the `/media` folder is mapped t
|
||||
|
||||
If MQTT isn't working in docker try using the IP of the device hosting the MQTT server instead of `localhost`, `127.0.0.1`, or `mosquitto.ix-mosquitto.svc.cluster.local`.
|
||||
|
||||
This is because, by default, Frigate does not run in host mode so localhost points to the Frigate container and not the host device's network.
|
||||
This is because, by default, Frigate does not run in host mode so localhost points to the Frigate container and not the host device's network.
|
||||
|
||||
@@ -3,9 +3,9 @@ id: recordings
|
||||
title: Troubleshooting Recordings
|
||||
---
|
||||
|
||||
## `WARNING : Unable to keep up with recording segments in cache for {camera}. Keeping the 5 most recent segments out of 6 and discarding the rest...`
|
||||
### WARNING : Unable to keep up with recording segments in cache for camera. Keeping the 5 most recent segments out of 6 and discarding the rest...
|
||||
|
||||
This error can be caused by a number of different issues. The first step in troubleshooting is to enable debug logging for recording, this will enable logging showing how long it takes for recordings to be moved from RAM cache to the disk.
|
||||
This error can be caused by a number of different issues. The first step in troubleshooting is to enable debug logging for recording. This will enable logging showing how long it takes for recordings to be moved from RAM cache to the disk.
|
||||
|
||||
```yaml
|
||||
logger:
|
||||
@@ -21,18 +21,53 @@ DEBUG : Copied /media/frigate/recordings/{segment_path} in 0.2 seconds.
|
||||
|
||||
It is important to let this run until the errors begin to happen, to confirm that there is not a slow down in the disk at the time of the error.
|
||||
|
||||
### Copy Times > 1 second
|
||||
#### Copy Times > 1 second
|
||||
|
||||
If the storage is too slow to keep up with the recordings then the maintainer will fall behind and purge the oldest recordings to ensure the cache does not fill up causing a crash. In this case it is important to diagnose why the copy times are slow.
|
||||
|
||||
#### Check Storage Type
|
||||
##### Check RAM, swap, cache utilization, and disk utilization
|
||||
|
||||
If CPU, RAM, disk throughput, or bus I/O is insufficient, nothing inside frigate will help. It is important to review each aspect of available system resources.
|
||||
|
||||
On linux, some helpful tools/commands in diagnosing would be:
|
||||
|
||||
- docker stats
|
||||
- htop
|
||||
- iotop -o
|
||||
- iostat -sxy --human 1 1
|
||||
- vmstat 1
|
||||
|
||||
On modern linux kernels, the system will utilize some swap if enabled. Setting vm.swappiness=1 no longer means that the kernel will only swap in order to avoid OOM. To prevent any swapping inside a container, set allocations memory and memory+swap to be the same and disable swapping by setting the following docker/podman run parameters:
|
||||
|
||||
**Compose example**
|
||||
```yaml
|
||||
version: "3.9"
|
||||
services:
|
||||
frigate:
|
||||
...
|
||||
mem_swappiness: 0
|
||||
memswap_limit: <MAXSWAP>
|
||||
deploy:
|
||||
resources:
|
||||
limits:
|
||||
memory: <MAXRAM>
|
||||
```
|
||||
|
||||
**Run command example**
|
||||
```
|
||||
--memory=<MAXRAM> --memory-swap=<MAXSWAP> --memory-swappiness=0
|
||||
```
|
||||
|
||||
NOTE: These are hard-limits for the container, be sure there is enough headroom above what is shown by `docker stats` for your container. It will immediately halt if it hits `<MAXRAM>`. In general, running all cache and tmp filespace in RAM is preferable to disk I/O where possible.
|
||||
|
||||
##### Check Storage Type
|
||||
|
||||
Mounting a network share is a popular option for storing Recordings, but this can lead to reduced copy times and cause problems. Some users have found that using `NFS` instead of `SMB` considerably decreased the copy times and fixed the issue. It is also important to ensure that the network connection between the device running Frigate and the network share is stable and fast.
|
||||
|
||||
#### Check mount options
|
||||
##### Check mount options
|
||||
|
||||
Some users found that mounting a drive via `fstab` with the `sync` option caused dramatically reduce performance and led to this issue. Using `async` instead greatly reduced copy times.
|
||||
|
||||
### Copy Times < 1 second
|
||||
#### Copy Times < 1 second
|
||||
|
||||
If the storage is working quickly then this error may be caused by CPU load on the machine being too high for Frigate to have the resources to keep up. Try temporarily shutting down other services to see if the issue improves.
|
||||
|
||||
Some files were not shown because too many files have changed in this diff Show More
Reference in New Issue
Block a user