mirror of
https://github.com/PaddlePaddle/FastDeploy.git
synced 2025-11-01 20:32:52 +08:00
* 更新ppdet * 更新ppdet * 更新ppdet * 更新ppdet * 更新ppdet * 新增ppdet_decode * 更新多batch支持 * 更新多batch支持 * 更新多batch支持 * 更新注释内容 * 尝试解决pybind问题 * 尝试解决pybind的问题 * 尝试解决pybind的问题 * 重构代码 * 重构代码 * 重构代码 * 按照要求修改 * 更新Picodet文档 * 更新Picodet文档,更新yolov8文档 * 修改picodet 以及 yolov8 example * 更新Picodet模型转换脚本 * 更新example代码 * 更新yolov8量化代码 * 修复部分bug 加入pybind * 修复pybind * 修复pybind错误的问题 * 更新说明文档 * 更新说明文档
2.4 KiB
2.4 KiB
Picodet RKNPU2模型转换文档
以下步骤均在Ubuntu电脑上完成,请参考配置文档完成转换模型环境配置。下面以Picodet-s为例子,教大家如何转换PaddleDetection模型到RKNN模型。
导出ONNX模型
# 下载Paddle静态图模型并解压
wget https://paddledet.bj.bcebos.com/deploy/Inference/picodet_s_416_coco_lcnet.tar
tar xvf picodet_s_416_coco_lcnet.tar
# 静态图转ONNX模型,注意,这里的save_file请和压缩包名对齐
paddle2onnx --model_dir picodet_s_416_coco_lcnet \
--model_filename model.pdmodel \
--params_filename model.pdiparams \
--save_file picodet_s_416_coco_lcnet/picodet_s_416_coco_lcnet.onnx \
--enable_dev_version True
# 固定shape
python -m paddle2onnx.optimize --input_model picodet_s_416_coco_lcnet/picodet_s_416_coco_lcnet.onnx \
--output_model picodet_s_416_coco_lcnet/picodet_s_416_coco_lcnet.onnx \
--input_shape_dict "{'image':[1,3,416,416]}"
编写模型导出配置文件
以转化RK3568的RKNN模型为例子,我们需要编辑tools/rknpu2/config/picodet_s_416_coco_lcnet_unquantized.yaml,来转换ONNX模型到RKNN模型。
修改normalize参数
如果你需要在NPU上执行normalize操作,请根据你的模型配置normalize参数,例如:
mean:
-
- 127.5
- 127.5
- 127.5
std:
-
- 127.5
- 127.5
- 127.5
修改outputs参数 由于Paddle2ONNX版本的不同,转换模型的输出节点名称也有所不同,请使用Netron对模型进行可视化,并找到以下蓝色方框标记的NonMaxSuppression节点,红色方框的节点名称即为目标名称。
例如,使用Netron可视化后,得到以下图片:
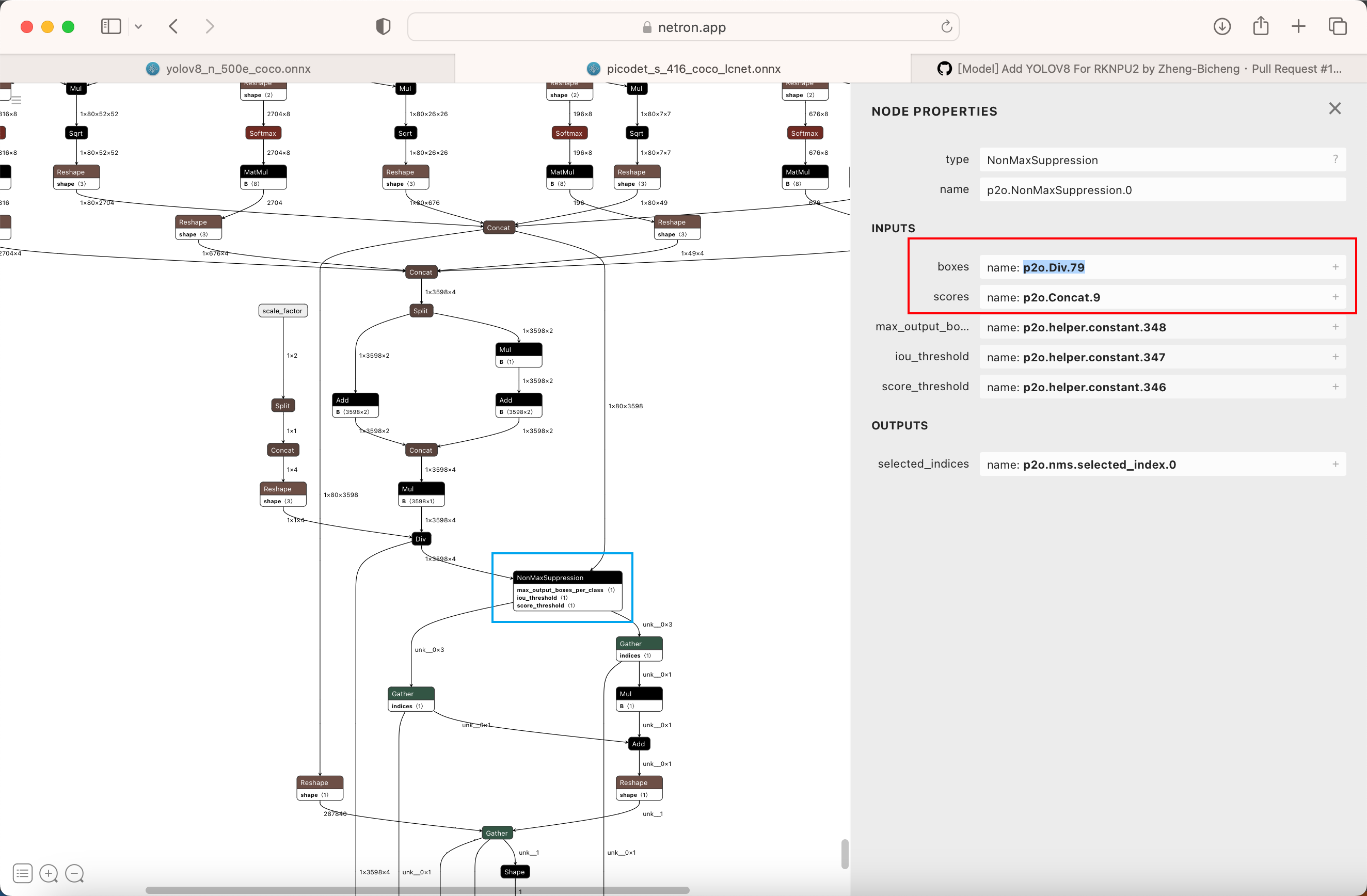
找到蓝色方框标记的NonMaxSuppression节点,可以看到红色方框标记的两个节点名称为p2o.Div.79和p2o.Concat.9,因此需要修改outputs参数,修改后如下:
outputs_nodes: [ 'p2o.Div.79','p2o.Concat.9' ]
转换模型
# ONNX模型转RKNN模型
# 转换模型,模型将生成在picodet_s_320_coco_lcnet_non_postprocess目录下
python tools/rknpu2/export.py --config_path tools/rknpu2/config/picodet_s_416_coco_lcnet_unquantized.yaml \
--target_platform rk3588